用于单相电机调速的单片PWM控制技术
时间:12-04
来源:互联网
点击:
3.4 桥臂互锁及死区时间
为了保证逆变器同一桥臂上下两管同时导通而引起的短路,两驱动信号间必须留有一定的死 区时间,以防止一管还未完全关断时另一管便开始导通的短路故障。此要求可以在单片机PWM波的计算程序中加以考虑。然而这样做往往会增加单片机的数据处理工作量,而且仅靠软件实现上下桥臂开关管的互锁和死区延迟也不可靠,因此,为保证电路的安全性,建议最好在硬件电路设计上充分考虑并实现此项要求。
3.5 初始状态及故障封锁
任何一款型号的CPU,工作前总存在复位状态,此时CPU各I/O输出口全“1”或全“0”,设 计时应避免在此复位状态时造成所有开关管都被驱动导通的危险,因此应将CPU复位时的初 始电平值设置成开关管驱动信号无效状态。此外,当发生故障时,也可以通过输出故障封锁信号来关闭驱动信号。
4 PWM波的单片机控制
在本文分析的洗衣机电机控制中,逆变器的输出频率由给定电位器调节,经A/D转换输入至 单片机,由单片机根据给定输出频率的大小计算逆变器电压,以适应变频调速的恒V/f 比控制要求。控制芯片采用AT90S8535单片机。
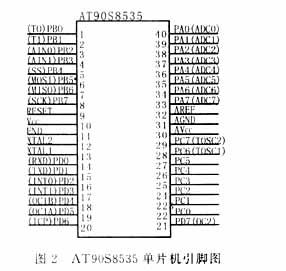
AT90S8535是40脚封装的RISC结构低功耗CMOS 8位单片机,具有8K字节的Flash,512字节的EE PROM,512字节RAM,32个多功能的I/O口,3个内部定时/计数器,8通道10位A/D转换器,2个外部中断源,可编程的串行通讯,可编程的看门狗定时器等资源,适合于许多要求集成度高、成本低的应用场合,其引脚配置如图2所示。
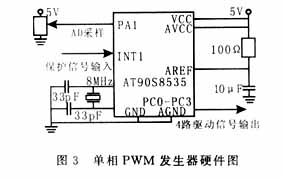
设逆变器输出压频变化关系曲线是已知的,当逆变器的输出频率确定后,PWM控制的载波比 和调制深度指令也随之确定。单片机的资源分配为:39脚的PA1作为A/D采样输入口,采样输出频率;PC0~PC3作为PWM输出的驱动信号,设置为输出口;17脚的INT1外部中断作为电路 故障信号(如过流、过压、短路等)的输入脚,同时该脚也作为“解除闭锁”控制位的输入脚,其作用在于:当故障发生时,由外部中断输入引脚的信号变化向CPU提出中断请求,CPU响应中断,在执行中断服务程序中输出PWM封锁信号并实现闭锁,直到解除闭锁控制位有效时,才撤销PWM封锁信号,使PWM波能够正常输出。由于AT90S8535芯片的复位时端口的初始状态是“高”,因此封锁信号和驱动信号均设置成“低”电平为无效状态,此时端口输出信号使所有功率开关管处于关断状态。PWM波的载波周期由片内T0定时器来完成,PWM波换相所需的时间由片内T1定时器来实现。采用AT90S8535单片机实现的单相PWM波形发生器的硬件连接关系如图3所示。
5 单片机控制软件设计
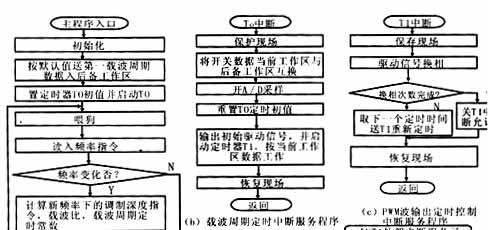
按上述算法分析,软件只计算PWM波的切换时间,在CPU中由定时中断服务程序完成PWM脉冲 波的换相。其具体过程:PWM的载波周期Ts由载波周期定时器定时,当定时到时,向C PU发出中断申请,CPU响应中断并执行中断服务程序,此中断服务程序的主要任务是将保存 在内存中的PWM开关定时数据(在上一个载波周期计算出来的PWM换相定时时间)送PWM波定时器,并启动此定时器工作,然后再计算下一个载波周期的PWM数据并保存。
PWM波定时器根据载波周期定时中断服务程序送来的开关数据进行定时控制,在中断服务程 序中完成对PWM的换相并输出至端口。?
主程序的主要任务是,对逆变器输出频率指令f的采样或计算,并计算与频率指令对应的调 制深度指令、载波比、载波周期定时常数等,为载波周期定时中断服务程序的计算提供实时指令。然而在变频切换时,由于电压跟随频率的变化而改变,变频瞬间容易产生电流冲击。通常解决办法是在基波电压过零时(即0°、180°),变频瞬间无电流冲击,但该方法会造成频 率变化响应过程较慢,特别是低频时响应时间过长。因此最好能设计成在任何一个载波周期结束时刻都可以进行频率切换,为防止电流冲击的产生,此时应使频率切换前后的基波电压不仅与频率和相位有关,还和调制比有关,使得计算频率变化前后基波电压相等的条件相当费时,因此在实现过程中,一般按相位相等的原则进行频率切换。即在新旧频率切换时,根据脉冲计数器所表示的相位关系进行等相位切换。假定旧频率时的载波比为N1,频率变化的切换时刻计数器值为P1,新频率时载波比为N2,切换时新频率计数器的值P2应为:

求出P2后再进行切换。
实现PWM算法的整个控制程序流程如图4所示。
6 实验与结论
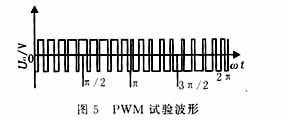
按照上述设计方法,研制了单片机控制系统的软硬件,并进行了实验,其输出波形如图5所 示。实验证明,该方法简单可行,控制性能良好,具有一定的实用价值。
此外,三相PWM发生器的实现方法与单相也是相似的,不同之处在于三相PWM发生器需要3个 PWM波换相定时器,再加上载波周期定时器,共需4个定时器。至于三相PWM发生器的软件设计,其基本的设计方法与单相的是相同的,这里不再讨论。
为了保证逆变器同一桥臂上下两管同时导通而引起的短路,两驱动信号间必须留有一定的死 区时间,以防止一管还未完全关断时另一管便开始导通的短路故障。此要求可以在单片机PWM波的计算程序中加以考虑。然而这样做往往会增加单片机的数据处理工作量,而且仅靠软件实现上下桥臂开关管的互锁和死区延迟也不可靠,因此,为保证电路的安全性,建议最好在硬件电路设计上充分考虑并实现此项要求。
3.5 初始状态及故障封锁
任何一款型号的CPU,工作前总存在复位状态,此时CPU各I/O输出口全“1”或全“0”,设 计时应避免在此复位状态时造成所有开关管都被驱动导通的危险,因此应将CPU复位时的初 始电平值设置成开关管驱动信号无效状态。此外,当发生故障时,也可以通过输出故障封锁信号来关闭驱动信号。
4 PWM波的单片机控制
在本文分析的洗衣机电机控制中,逆变器的输出频率由给定电位器调节,经A/D转换输入至 单片机,由单片机根据给定输出频率的大小计算逆变器电压,以适应变频调速的恒V/f 比控制要求。控制芯片采用AT90S8535单片机。
AT90S8535是40脚封装的RISC结构低功耗CMOS 8位单片机,具有8K字节的Flash,512字节的EE PROM,512字节RAM,32个多功能的I/O口,3个内部定时/计数器,8通道10位A/D转换器,2个外部中断源,可编程的串行通讯,可编程的看门狗定时器等资源,适合于许多要求集成度高、成本低的应用场合,其引脚配置如图2所示。
设逆变器输出压频变化关系曲线是已知的,当逆变器的输出频率确定后,PWM控制的载波比 和调制深度指令也随之确定。单片机的资源分配为:39脚的PA1作为A/D采样输入口,采样输出频率;PC0~PC3作为PWM输出的驱动信号,设置为输出口;17脚的INT1外部中断作为电路 故障信号(如过流、过压、短路等)的输入脚,同时该脚也作为“解除闭锁”控制位的输入脚,其作用在于:当故障发生时,由外部中断输入引脚的信号变化向CPU提出中断请求,CPU响应中断,在执行中断服务程序中输出PWM封锁信号并实现闭锁,直到解除闭锁控制位有效时,才撤销PWM封锁信号,使PWM波能够正常输出。由于AT90S8535芯片的复位时端口的初始状态是“高”,因此封锁信号和驱动信号均设置成“低”电平为无效状态,此时端口输出信号使所有功率开关管处于关断状态。PWM波的载波周期由片内T0定时器来完成,PWM波换相所需的时间由片内T1定时器来实现。采用AT90S8535单片机实现的单相PWM波形发生器的硬件连接关系如图3所示。
5 单片机控制软件设计
按上述算法分析,软件只计算PWM波的切换时间,在CPU中由定时中断服务程序完成PWM脉冲 波的换相。其具体过程:PWM的载波周期Ts由载波周期定时器定时,当定时到时,向C PU发出中断申请,CPU响应中断并执行中断服务程序,此中断服务程序的主要任务是将保存 在内存中的PWM开关定时数据(在上一个载波周期计算出来的PWM换相定时时间)送PWM波定时器,并启动此定时器工作,然后再计算下一个载波周期的PWM数据并保存。
PWM波定时器根据载波周期定时中断服务程序送来的开关数据进行定时控制,在中断服务程 序中完成对PWM的换相并输出至端口。?
主程序的主要任务是,对逆变器输出频率指令f的采样或计算,并计算与频率指令对应的调 制深度指令、载波比、载波周期定时常数等,为载波周期定时中断服务程序的计算提供实时指令。然而在变频切换时,由于电压跟随频率的变化而改变,变频瞬间容易产生电流冲击。通常解决办法是在基波电压过零时(即0°、180°),变频瞬间无电流冲击,但该方法会造成频 率变化响应过程较慢,特别是低频时响应时间过长。因此最好能设计成在任何一个载波周期结束时刻都可以进行频率切换,为防止电流冲击的产生,此时应使频率切换前后的基波电压不仅与频率和相位有关,还和调制比有关,使得计算频率变化前后基波电压相等的条件相当费时,因此在实现过程中,一般按相位相等的原则进行频率切换。即在新旧频率切换时,根据脉冲计数器所表示的相位关系进行等相位切换。假定旧频率时的载波比为N1,频率变化的切换时刻计数器值为P1,新频率时载波比为N2,切换时新频率计数器的值P2应为:
求出P2后再进行切换。
实现PWM算法的整个控制程序流程如图4所示。
6 实验与结论
按照上述设计方法,研制了单片机控制系统的软硬件,并进行了实验,其输出波形如图5所 示。实验证明,该方法简单可行,控制性能良好,具有一定的实用价值。
此外,三相PWM发生器的实现方法与单相也是相似的,不同之处在于三相PWM发生器需要3个 PWM波换相定时器,再加上载波周期定时器,共需4个定时器。至于三相PWM发生器的软件设计,其基本的设计方法与单相的是相同的,这里不再讨论。
PWM AVR 单片机 电压 电路 电流 逆变器 CMOS 看门狗 相关文章:
- 家居安防无线监控报警系统(04-02)
- 安森美90W太阳能LED街灯高能效解决方案(05-18)
- 基于DSP高精度伺服位置环设计(06-21)
- 基于DSP的工业缝纫机控制系统设计(09-23)
- 无传感器交流电动机控制技术提高了运行效率(10-15)
- 单片机对仪表步进电机的细分控制(10-20)