无传感器交流电动机控制技术提高了运行效率
时间:10-15
来源:互联网
点击:
作者:Freescale公司 Peter Balazovic 日期:2009-9-7
在家用电气市场领域,全球范围的节能和节水呼声非常高。政府法令和建议条款正在重新定义一个节能和合理高效使用能源的时代。为了满足政府的政策规定,以及降低系统成本,应用设计工程师正在使用高性能的数字信号控制器(DSC)。
基于数字信号控制技术的控制方案使用一个具有MCU功能的数字信号处理器,用于控制电动机的供电,这种方案能够非常容易的在单芯片上实现。此外,灵活的外围设备也可以令设计工程师非常方便地实现各种各样的功能。使用可调速电动机驱动器让设计工程师有机会设计更多非常复杂和精确的控制程序,并可以增强设备的性能,同时又能提高能效。
绝大多数家用电气中电动机所用的电子驱动器的控制是非常简单的,要么使用固定恒速电动机,要么就直接由交流电源驱动,而不需要额外的控制电路。交流单相感应电动机(ACIM)由于成本低和可靠性高而得到非常广泛的应用,但它的效率低,而且调速困难。调速电动机驱动器通过保持精确的转速控制,可以满足能效需求。
交流电动机的选择
可以选择的电动机类型有交流单相感应电动机、永磁电动机和开关磁阻电动机。为了对交流单相感应电动机调速,就必须调整供电的频率和电压,这通常是指恒定电压/Hz控制。单相感应电动机速度驱动的效率可以通过使用向量控制得到改善,但需要通过速度或位置传感器来精确测量速度,其结果就是成本会提高,而且需要很多配线。
永磁电动机不使用定子绕组实现磁场。使用永磁体代替电磁激励有很多优点。最常见的就是不会有激励损耗,这表明永磁电动机比其他电动机具有更高的功率密度。它的总体效率接近90%,而交流单相感应电动机的效率只有大约70%。永磁激励的同步电动机对于家庭应用是非常具有吸引力的,但它们却不能直接由交流供电。
调速电动机的驱动
如果电动机的电子控制器优化了速度扭矩比,消耗的总功率就可以降低至30%。交流调速驱动的控制器通过调整供给电动机的交流电频率来设置速度。
如图1所示,完整的调速驱动系统包括EMI滤波器、输入整流器、直流供电、DSC(数字信号控制器)、信号调理电路,供电变极器,以及门控驱动器等。

图1 使用供电变极器设置驱动频率的调速控制
电机控制策略
在交流单相感应电动机的调速驱动中,开环标量控制是最普遍的控制策略。图2描述了电机驱动频率的标量控制,电压的幅度与频率成比例。这种技术需要能够对功率进行适当的计算,并能够被8位微控制器所处理。

图2 向量控制提供了一种不需要旋转传感器的简单方法
这种简化方法的最大优点就是不需要传感器,而且控制算法也不需要角速度或电机位置信息。速度是与外部负载的扭矩相关的,然而,这也是一个最大的缺点,也就是它会降低动态性能。由于这个原因,标量控制的电动机在负载瞬时变化时,就会输出远远超过需要的扭矩。理论上,使用这种控制方法,能效可能低到50%。
然而,市场需要更高动态性能和工作速度范围的电动机。交流供电机械中向量控制(面向现场控制)比标量控制提供了更好的性能。向量控制克服了恒定电压/Hz控制方法中绝大部分缺点。
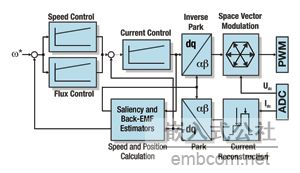
图3 使用向量控制的电动机驱动能够提供最高的动态性能和速度可调范围
内部电流回路计算了需要产生的扭矩和磁通电流要求的定子转向和定子电压积分。Park(dq/aβ)单元将电压转换为在静态参考结构中所需求的三相交流定子电压。
电动机的电流波形是正弦曲线,这可以产生平稳的扭矩,而且会减小机械震动和噪声。外部速度回路调整供电的定子数量,这直接与定子电流的积分成比例,并维持所要求的角速度。为了在基本速度之上扩展工作速度的范围,增加了额外的磁通弱化回路,用于处理定子定向磁通电流。
无传感器控制
为了用向量控制模式控制交流电动机,可以使供电的频率和转子磁通的位置同步。无传感器工作的本质是用计算速度和位置的方法替代传感器。无传感器控制改善了电动机控制的可靠性,并且能够在不增加额外成本的条件下维持很高的性能水平。这样的系统是更加精确和高效、体积更小、重量更轻、噪声更低,而且有更多的先进功能。
无传感器算法广义上可以分为两大类,一种是使用磁转子,它可以非常好地追踪转子的位置;另一种是通过计算电动机的工作模式来估计出转子的位置。
在电冰箱中,常规控制只是简单地开和关压缩机来把温度维持在预先设定的范围。使用无传感器永磁电动机控制,控制器可以在几秒钟内将压缩机加速到它的目标速度,并且可以将速度控制在±1%之内。压缩机的平稳运行降低了人耳可听见的噪声,而且更低的平均工作速度有助于减少温度循环周期,可以改善整体效率。
在洗衣机中,电动机的工作主要有两个基本周期,即洗衣阶段和甩干阶段。在洗衣阶段,电动机工作在低速状态,具有很高的扭矩。在甩干阶段,电动机在短时间内工作在非常高的速度。在比较新一些的模式中,控制器估计的速度起伏和计算的负载扭矩提供了关于洗衣过程中负载分配的有价值信息。在启动甩干阶段之前,速度起伏用于估计负载平衡。调速电动机可以用于控制洗衣过程的速度浴盆曲线,并且帮助校正平衡。
这种控制方法可以使用A/D转换器对模拟反馈信号(电压,电流)进行数字化。A/D转换器与PWM的重加载标志同步,但采样时间根据实际PWM码型的功能不同而不同。这样的配置允许在一个PWM周期内,对直接控制总线电流和电压模拟值进行多次转换。
PWM模块可以在一个中心对齐的配置中产生非对称的PWM占空周期,以用于重建每个关键开关码型中的三相电流。在数字信号控制器中,一个灵活的四路定时器模块为每个时间事件提供定时。在一般的应用中,使用一个通道用于把PWM和A/D转换器同步,另一个通道用于系统速度控制回路(周期为 1ms)。数字信号控制器可以通过一个隔离链路与前面板主控制单元通信。
在家用电气市场领域,全球范围的节能和节水呼声非常高。政府法令和建议条款正在重新定义一个节能和合理高效使用能源的时代。为了满足政府的政策规定,以及降低系统成本,应用设计工程师正在使用高性能的数字信号控制器(DSC)。
基于数字信号控制技术的控制方案使用一个具有MCU功能的数字信号处理器,用于控制电动机的供电,这种方案能够非常容易的在单芯片上实现。此外,灵活的外围设备也可以令设计工程师非常方便地实现各种各样的功能。使用可调速电动机驱动器让设计工程师有机会设计更多非常复杂和精确的控制程序,并可以增强设备的性能,同时又能提高能效。
绝大多数家用电气中电动机所用的电子驱动器的控制是非常简单的,要么使用固定恒速电动机,要么就直接由交流电源驱动,而不需要额外的控制电路。交流单相感应电动机(ACIM)由于成本低和可靠性高而得到非常广泛的应用,但它的效率低,而且调速困难。调速电动机驱动器通过保持精确的转速控制,可以满足能效需求。
交流电动机的选择
可以选择的电动机类型有交流单相感应电动机、永磁电动机和开关磁阻电动机。为了对交流单相感应电动机调速,就必须调整供电的频率和电压,这通常是指恒定电压/Hz控制。单相感应电动机速度驱动的效率可以通过使用向量控制得到改善,但需要通过速度或位置传感器来精确测量速度,其结果就是成本会提高,而且需要很多配线。
永磁电动机不使用定子绕组实现磁场。使用永磁体代替电磁激励有很多优点。最常见的就是不会有激励损耗,这表明永磁电动机比其他电动机具有更高的功率密度。它的总体效率接近90%,而交流单相感应电动机的效率只有大约70%。永磁激励的同步电动机对于家庭应用是非常具有吸引力的,但它们却不能直接由交流供电。
调速电动机的驱动
如果电动机的电子控制器优化了速度扭矩比,消耗的总功率就可以降低至30%。交流调速驱动的控制器通过调整供给电动机的交流电频率来设置速度。
如图1所示,完整的调速驱动系统包括EMI滤波器、输入整流器、直流供电、DSC(数字信号控制器)、信号调理电路,供电变极器,以及门控驱动器等。
图1 使用供电变极器设置驱动频率的调速控制
电机控制策略
在交流单相感应电动机的调速驱动中,开环标量控制是最普遍的控制策略。图2描述了电机驱动频率的标量控制,电压的幅度与频率成比例。这种技术需要能够对功率进行适当的计算,并能够被8位微控制器所处理。
图2 向量控制提供了一种不需要旋转传感器的简单方法
这种简化方法的最大优点就是不需要传感器,而且控制算法也不需要角速度或电机位置信息。速度是与外部负载的扭矩相关的,然而,这也是一个最大的缺点,也就是它会降低动态性能。由于这个原因,标量控制的电动机在负载瞬时变化时,就会输出远远超过需要的扭矩。理论上,使用这种控制方法,能效可能低到50%。
然而,市场需要更高动态性能和工作速度范围的电动机。交流供电机械中向量控制(面向现场控制)比标量控制提供了更好的性能。向量控制克服了恒定电压/Hz控制方法中绝大部分缺点。
图3 使用向量控制的电动机驱动能够提供最高的动态性能和速度可调范围
内部电流回路计算了需要产生的扭矩和磁通电流要求的定子转向和定子电压积分。Park(dq/aβ)单元将电压转换为在静态参考结构中所需求的三相交流定子电压。
电动机的电流波形是正弦曲线,这可以产生平稳的扭矩,而且会减小机械震动和噪声。外部速度回路调整供电的定子数量,这直接与定子电流的积分成比例,并维持所要求的角速度。为了在基本速度之上扩展工作速度的范围,增加了额外的磁通弱化回路,用于处理定子定向磁通电流。
无传感器控制
为了用向量控制模式控制交流电动机,可以使供电的频率和转子磁通的位置同步。无传感器工作的本质是用计算速度和位置的方法替代传感器。无传感器控制改善了电动机控制的可靠性,并且能够在不增加额外成本的条件下维持很高的性能水平。这样的系统是更加精确和高效、体积更小、重量更轻、噪声更低,而且有更多的先进功能。
无传感器算法广义上可以分为两大类,一种是使用磁转子,它可以非常好地追踪转子的位置;另一种是通过计算电动机的工作模式来估计出转子的位置。
在电冰箱中,常规控制只是简单地开和关压缩机来把温度维持在预先设定的范围。使用无传感器永磁电动机控制,控制器可以在几秒钟内将压缩机加速到它的目标速度,并且可以将速度控制在±1%之内。压缩机的平稳运行降低了人耳可听见的噪声,而且更低的平均工作速度有助于减少温度循环周期,可以改善整体效率。
在洗衣机中,电动机的工作主要有两个基本周期,即洗衣阶段和甩干阶段。在洗衣阶段,电动机工作在低速状态,具有很高的扭矩。在甩干阶段,电动机在短时间内工作在非常高的速度。在比较新一些的模式中,控制器估计的速度起伏和计算的负载扭矩提供了关于洗衣过程中负载分配的有价值信息。在启动甩干阶段之前,速度起伏用于估计负载平衡。调速电动机可以用于控制洗衣过程的速度浴盆曲线,并且帮助校正平衡。
这种控制方法可以使用A/D转换器对模拟反馈信号(电压,电流)进行数字化。A/D转换器与PWM的重加载标志同步,但采样时间根据实际PWM码型的功能不同而不同。这样的配置允许在一个PWM周期内,对直接控制总线电流和电压模拟值进行多次转换。
PWM模块可以在一个中心对齐的配置中产生非对称的PWM占空周期,以用于重建每个关键开关码型中的三相电流。在数字信号控制器中,一个灵活的四路定时器模块为每个时间事件提供定时。在一般的应用中,使用一个通道用于把PWM和A/D转换器同步,另一个通道用于系统速度控制回路(周期为 1ms)。数字信号控制器可以通过一个隔离链路与前面板主控制单元通信。
Freescale MCU 电动机 电子 电路 电压 传感器 滤波器 电流 PWM 总线 相关文章:
- 随钻测井系统井下传感器的低功耗设计(01-11)
- 基于ZigBee技术的XBee Pro模块在智能公交系统中的应用(03-06)
- 基于CAN_GSM车辆监控系统设计(03-07)
- 以太网的二代身份证RFID系统应用研究(04-02)
- CAN总线冗余的船舶监控系统设计(06-02)
- 基于MC9RS08KA2红外远距离多键控制方案设计(07-28)