可选择谐波型有源滤波器的检测及其闭环控制
时间:08-03
来源:互联网
点击:
有源电力滤波器(active pow er filter, APF ) 是目前谐波补偿的一种重要的电力电子装置。大多数传统APF 的谐波电流检测方法基于时域瞬时无功功率理论。该检测方法的核心是将检测出的基波电流与负载电流相减, 得到全部谐波电流并对其进行补偿。这种基于传统检测方法的A PF 应用已经比较广泛。但是由于系统本身固有的延时, 例如检测环节中的计算延时和电压型逆变器(voltagesource inverter, VSI) 的延时等, 使得APF 对于高次谐波的补偿出现误差, 甚至于放大某些高次谐波。因为数字控制器及V S I 的延时滞后的存在, 所以很难采用闭环的电流控制方法。另外, 采用传统的谐波电流检测方法时, 如果负载中包含容性负载, 由于容性负载和感性负载的谐振, 使得系统在补偿谐振频率附近的谐波时出现不稳定的情况。此外, 当谐波的主要成分是5 次、7 次、11 次等低次谐波时, 系统对于它们的补偿的利用率很低。
本文提出了一种带预测补偿的选择性谐波检测方法以及基于该方法的电压和电流闭环控制方法。这种检测方法是从负载电流中直接检测出指定次谐波(包括正序谐波和负序谐波) , 并通过增加预测补偿角彻底解决系统的延时, 达到精确的实时检测和补偿。闭环的电流控制完成了补偿电流对检测信号的跟踪, 电压控制完成了对于V S I 直流侧电压的稳定控制。
带预测补偿的SHC-APF
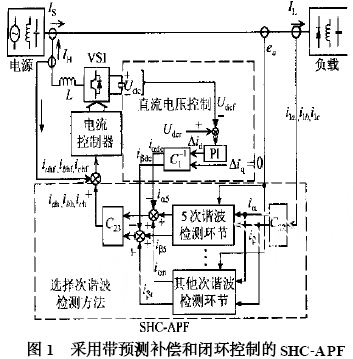
如图1 所示, 带预测补偿的SHC-APF 采用了带预测补偿的选择性谐波检测方法以及基于该检测方法的电流和电压的闭环控制。其中, 带预测补偿的选择性谐波检测环节直接检测出任意指定次谐波;电流的闭环控制使得输出的补偿电流可以精确地跟随给定的补偿电流信号; 电压闭环控制使SHC-A PF 中V S I 的直流侧电容电压控制在指定的电压值, 从而保持V S I 的交流侧与电源之间的电压差。
带预测补偿的选择性谐波检测方法
上述SHC-APF 中的带预测补偿的选择性谐波检测方法所基于的理论基础与传统方法一致, 即电力系统中基波和各次谐波的频率基本不变。
如图2 所示, 根据这一假定和Fourier 级数, 可以用锁相环(PLL ) 来获得所需要检测的指定次谐波的频率值。将电压ea n 倍频后通过锁相环和正、余弦发生电路得到与ea 同相位的正弦信号sin (nωt) 和对应的余弦信号cos (nωt) , 从而得到变换阵
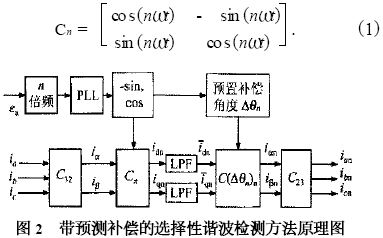
三相电流ia、ib、ic 经过C32变换矩阵完成静止坐标系下三相到两相的变换。将两相电流iα、iβ 经过变换阵Cn 得出在旋转坐标系下的n 次谐波的有功和无功电流分量ipn、iqn , 其中,

旋转变换后的电流分量经过低通滤波器(L PF)滤波, 可得到用直流分量{ idn , iqn}表示的该次谐波的幅值。
但是, 直接对该分量进行旋转反变换用来补偿时, 由于当系统总延迟时间为ΔT 时, 设基波角频率为ω, 在这ΔT 内已经旋转过的角度为

即变换矩阵中该次谐波电角度为nθ时刻补偿的是电角度为θn - Δθn 时刻的谐波电流值, 从而造成系统的错误补偿。严重时, 某个谐波的补偿甚至会形成正反馈。例如对11 次谐波而言, 在工频50Hz, 延迟时间1 m s 时, 11 次谐波在1 m s 内旋转了3. 454 rad, 接近180°。
为彻底解决了系统延时问题, 假定谐波电流周期性变化, 可以通过在旋转反变换矩阵中修改电角度来改变进行补偿的时刻。在原有电角度上加入Δθn, 从而彻底补偿了系统延时。Δθn为预测补偿角度。这样, 直流分量经过反变换阵C (Δθn) - 1n 和C23最终得出n 次谐波电流ian、ibn、icn。其中, 有C23= CT32

以上讲述的是为某次谐波的检测方法, 当需要APF 补偿特殊指定的某几次谐波时, 如图1 中最下面的虚线框, 可以采取各次谐波并行计算的方式, 分别求出指定的各次谐波, 然后将各次谐波相加得到SHC-A PF 的补偿电流指令信号。
电流闭环控制
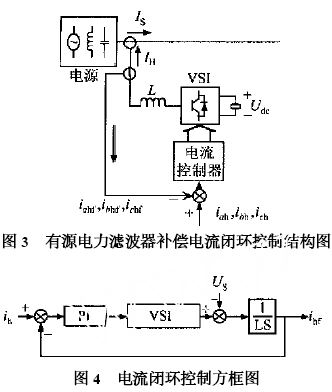
上述SHC-A PF 在检测出了谐波电流信号以后, 需要经过电流控制环节, 产生驱动V S I 的PWM信号, 最终由V S I 产生补偿电流。传统方法中由于数字控制器及V S I 延时滞后的存在, 很难采用电流闭环完成对较高谐波电流的跟踪补偿。而对于SHC-A PF, 因为只是补偿低次谐波, 电流闭环的响应速度很容易满足要求, 因此, 可以引入电流闭环。图3 为有源电力滤波器补偿电流闭环控制的结构图, 其中iah、ibh、ich就是补偿电流指令, 来自于检测单元。补偿电流指令信号经过电流控制环节产生PWM 脉冲信号, 从而控制V S I 发出补偿电流iahf、ibhf、ichf。将实际补偿电流与补偿电流指令信号进行比较, 形成闭环的电流跟踪控制。
由图3 得到如图4 的补偿电流闭环控制系统的方框图。图中, 误差经过一个P I 调节器后, 经过V S I产生出PWM 电压信号, 作用在电感上产生实际的补偿电流作为系统的输出。V S I 可以近似为一个比例常数。由于被控对象为一阶环节, 所以只需要P调节器就可以使得电流环实现阶跃无静差。
本文提出了一种带预测补偿的选择性谐波检测方法以及基于该方法的电压和电流闭环控制方法。这种检测方法是从负载电流中直接检测出指定次谐波(包括正序谐波和负序谐波) , 并通过增加预测补偿角彻底解决系统的延时, 达到精确的实时检测和补偿。闭环的电流控制完成了补偿电流对检测信号的跟踪, 电压控制完成了对于V S I 直流侧电压的稳定控制。
带预测补偿的SHC-APF
如图1 所示, 带预测补偿的SHC-APF 采用了带预测补偿的选择性谐波检测方法以及基于该检测方法的电流和电压的闭环控制。其中, 带预测补偿的选择性谐波检测环节直接检测出任意指定次谐波;电流的闭环控制使得输出的补偿电流可以精确地跟随给定的补偿电流信号; 电压闭环控制使SHC-A PF 中V S I 的直流侧电容电压控制在指定的电压值, 从而保持V S I 的交流侧与电源之间的电压差。
带预测补偿的选择性谐波检测方法
上述SHC-APF 中的带预测补偿的选择性谐波检测方法所基于的理论基础与传统方法一致, 即电力系统中基波和各次谐波的频率基本不变。
如图2 所示, 根据这一假定和Fourier 级数, 可以用锁相环(PLL ) 来获得所需要检测的指定次谐波的频率值。将电压ea n 倍频后通过锁相环和正、余弦发生电路得到与ea 同相位的正弦信号sin (nωt) 和对应的余弦信号cos (nωt) , 从而得到变换阵
三相电流ia、ib、ic 经过C32变换矩阵完成静止坐标系下三相到两相的变换。将两相电流iα、iβ 经过变换阵Cn 得出在旋转坐标系下的n 次谐波的有功和无功电流分量ipn、iqn , 其中,
旋转变换后的电流分量经过低通滤波器(L PF)滤波, 可得到用直流分量{ idn , iqn}表示的该次谐波的幅值。
但是, 直接对该分量进行旋转反变换用来补偿时, 由于当系统总延迟时间为ΔT 时, 设基波角频率为ω, 在这ΔT 内已经旋转过的角度为
即变换矩阵中该次谐波电角度为nθ时刻补偿的是电角度为θn - Δθn 时刻的谐波电流值, 从而造成系统的错误补偿。严重时, 某个谐波的补偿甚至会形成正反馈。例如对11 次谐波而言, 在工频50Hz, 延迟时间1 m s 时, 11 次谐波在1 m s 内旋转了3. 454 rad, 接近180°。
为彻底解决了系统延时问题, 假定谐波电流周期性变化, 可以通过在旋转反变换矩阵中修改电角度来改变进行补偿的时刻。在原有电角度上加入Δθn, 从而彻底补偿了系统延时。Δθn为预测补偿角度。这样, 直流分量经过反变换阵C (Δθn) - 1n 和C23最终得出n 次谐波电流ian、ibn、icn。其中, 有C23= CT32
以上讲述的是为某次谐波的检测方法, 当需要APF 补偿特殊指定的某几次谐波时, 如图1 中最下面的虚线框, 可以采取各次谐波并行计算的方式, 分别求出指定的各次谐波, 然后将各次谐波相加得到SHC-A PF 的补偿电流指令信号。
电流闭环控制
上述SHC-A PF 在检测出了谐波电流信号以后, 需要经过电流控制环节, 产生驱动V S I 的PWM信号, 最终由V S I 产生补偿电流。传统方法中由于数字控制器及V S I 延时滞后的存在, 很难采用电流闭环完成对较高谐波电流的跟踪补偿。而对于SHC-A PF, 因为只是补偿低次谐波, 电流闭环的响应速度很容易满足要求, 因此, 可以引入电流闭环。图3 为有源电力滤波器补偿电流闭环控制的结构图, 其中iah、ibh、ich就是补偿电流指令, 来自于检测单元。补偿电流指令信号经过电流控制环节产生PWM 脉冲信号, 从而控制V S I 发出补偿电流iahf、ibhf、ichf。将实际补偿电流与补偿电流指令信号进行比较, 形成闭环的电流跟踪控制。
由图3 得到如图4 的补偿电流闭环控制系统的方框图。图中, 误差经过一个P I 调节器后, 经过V S I产生出PWM 电压信号, 作用在电感上产生实际的补偿电流作为系统的输出。V S I 可以近似为一个比例常数。由于被控对象为一阶环节, 所以只需要P调节器就可以使得电流环实现阶跃无静差。
滤波器 电力电子 电流 电压 逆变器 电容 电路 低通滤波器 PWM 电感 仿真 电容器 相关文章:
- 基于nRF2401智能小区无线抄表系统集中器设计(04-30)
- 卫星电源分系统可靠性设计与研究(02-12)
- 新型锁相环芯片全面提升红外无线麦克风产品性能(05-04)
- 基于音频信号的轴承故障诊断方法(03-17)
- 基于nRF2401智能无线火灾监控系统设计(04-01)
- 提高实时系统数据采集质量的研究(04-09)