基于S7-200的步进电机控制器设计
时间:04-26
来源:互联网
点击:
引言
步进电机是一种将电脉冲转化为角位移的执行机构,主要优点是定位精度高、无位置累积误差。并且与闭环控制系统相比,其特有的开环运行机制能够降低系统的成本、提高系统的可靠性,因此被广泛应用于对精度要求较高的运动控制系统中,如机器人、打印机、软盘驱动器、绘图仪和机械阀门控制器等。目前,能够对步进电机进行控制的主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器和专用集成芯片环形脉冲分配器等。分散器件组成的环形脉冲分配器体积比较大、可靠性较低;软件环形分配器运行速度低;专用集成芯片环形脉冲分配器集成度高、可靠性好,但适应性差、开发周期长、费用较高。
德国西门子公司的S7-200[1] 是一种小型的可编程序控制器,其功能强大,无论在独立运行中还是相连成网络,皆能实现复杂控制功能,具有极高的性价比。本文利用S7-200作为核心控制器件,凭借其产生的脉冲和实时定位系统来实现步进电机的控制。该控制器不但可以改善步进电机在低速运行时振动大、噪声大的缺点,而且可以克服步进电机在自然振荡频率附近运行时易产生共振、以及输出转矩随着步进电机的转速升高而下降等缺点,从而能够显著地提高步进电机的性能,拓宽步进电机的应用领域。
步进电机控制
步进电机是数字控制电机,它区别于其他类型的控制电机的最大特点是:通过输入脉冲信号来进行控制,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定[2]。当步进驱动器接收到一个脉冲信号,便驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”)。其旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机可分为反应式步进电机(VR)、永磁式步进电机(PM)和混合式步进电机(HB)[3]。
步进电机的驱动电路根据控制信号进行工作,控制信号由相应的控制器来产生,控制换相顺序和通电换相。这一过程称为“脉冲分配”。例如:四相步进电机的单四拍工作方式,其各相通电顺序为A-B-C-D。通电控制脉冲必须严格按照这一顺序分别控制A、B、C、D相的通断,控制步进电机的转向。如果给定工作方式正序换相通电,则步进电机正转;如果按反序换相通电,则电机就反转。步进电机接收到一个控制脉冲,便转一步;再接收到一个脉冲,再转一步。两个脉冲的间隔越短,步进电机转得越快。调整控制器发出的脉冲频率,就可以对步进电机进行调速[4]。
控制系统完成的功能
步进电机的平稳起动、加速、减速和平稳停止
这是控制系统首先要实现的功能[7]。S7-200中,支持高速输出口PTO0/PTO1的线性加/减速,通过MicroWin向导程序,非常容易实现。实际上,以目前的情况,线性加/减速只能使用向导生成的程序,西门子没有公开独立可使用的指令。
定位控制功能
定位控制、调节和控制操作之间存在一些区别。步进电机不需要连续的位置控制,而在控制操作中得到广泛应用[9]。借助于CPU214所产生的集成脉冲输出和定位指令系统,确定相对一根轴的固定参考点,借助于一个输入字节的对偶码(Dual coding)给CPU指定定位角度,在程序中根据该码计算出所需的定位步数,再由CPU输出相关个数的控制脉冲,通过步进电机来实现相对的定位控制。
额定电流可调等角度恒力矩细分驱动方法的功能实现
步进电机的驱动方式有多种,如恒电压、恒电流等多种形式。而这些方式都存在一定的缺陷,特别是在低速运行时的振动大、噪声大和在步进电机自然振荡频率附近运行时易产生共振,且输出转矩随着步进电机的转速升高而下降等缺点。为了改变上述缺陷,本文采用了额定电流可调等角度恒力矩细分驱动方案。该方案最主要的优点是:步距角变小,分辨率高,提高了电机的定位精度、启动性能和高频输出转矩,减弱或消除了步进电机的低频振动,降低了步进电机在共振区工作的几率。一般细分驱动只改变相应绕组中电流的一部分,电动机的合成磁势也只是旋转步距角的一部分,绕组电流不是一个方波而是阶梯波,额定电流是台阶式的投入或切除,如图1所示。
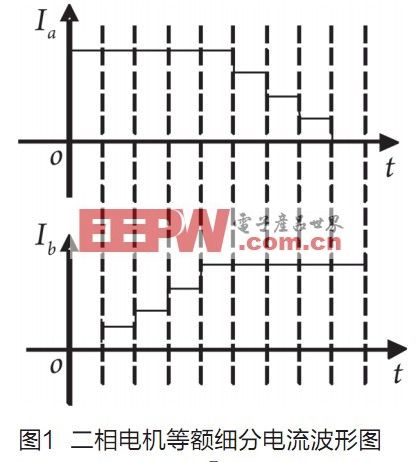
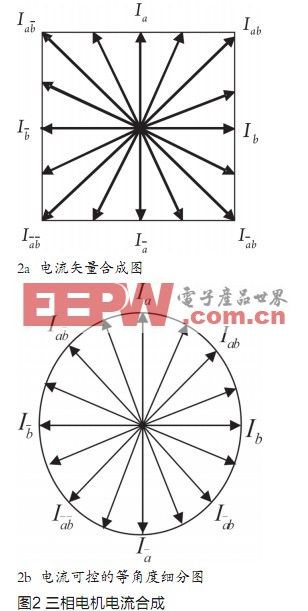
其合成的矢量幅值是不断变化的,输出力矩也跟着不断变化,从而会引起滞后角的不断变化。当细分数很大、微步距角非常小时,滞后角变化的差值已大于所要求细分的微步距角,使得细分失去了意义。据此分析,采用建立数学关系同时改变两相电流,即Ia和Ib以某一数学关系同时变化,保证变化过程中合成矢量幅值始终不变。建立一种“额定电流可调的等角度恒力矩细分”驱动方法,以消除力距不断变化引起滞后角的问题。这种合成矢量幅值保持不变的数学模型为:当 Ia=Imcosx,Ib=Imsinx时(式中Im为电流额定值,Ia、Ib为实际的相电流,x由细分数决定),其合成矢量始终为圆的半径,即恒力距; 等角度是指合成的力臂每次旋转的角度一样;额定电流可调是指可满足各种系列电机的要求;细分为对额定电流的细分(如图2a和2b所示)。
步进电机是一种将电脉冲转化为角位移的执行机构,主要优点是定位精度高、无位置累积误差。并且与闭环控制系统相比,其特有的开环运行机制能够降低系统的成本、提高系统的可靠性,因此被广泛应用于对精度要求较高的运动控制系统中,如机器人、打印机、软盘驱动器、绘图仪和机械阀门控制器等。目前,能够对步进电机进行控制的主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器和专用集成芯片环形脉冲分配器等。分散器件组成的环形脉冲分配器体积比较大、可靠性较低;软件环形分配器运行速度低;专用集成芯片环形脉冲分配器集成度高、可靠性好,但适应性差、开发周期长、费用较高。
德国西门子公司的S7-200[1] 是一种小型的可编程序控制器,其功能强大,无论在独立运行中还是相连成网络,皆能实现复杂控制功能,具有极高的性价比。本文利用S7-200作为核心控制器件,凭借其产生的脉冲和实时定位系统来实现步进电机的控制。该控制器不但可以改善步进电机在低速运行时振动大、噪声大的缺点,而且可以克服步进电机在自然振荡频率附近运行时易产生共振、以及输出转矩随着步进电机的转速升高而下降等缺点,从而能够显著地提高步进电机的性能,拓宽步进电机的应用领域。
步进电机控制
步进电机是数字控制电机,它区别于其他类型的控制电机的最大特点是:通过输入脉冲信号来进行控制,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定[2]。当步进驱动器接收到一个脉冲信号,便驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”)。其旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机可分为反应式步进电机(VR)、永磁式步进电机(PM)和混合式步进电机(HB)[3]。
步进电机的驱动电路根据控制信号进行工作,控制信号由相应的控制器来产生,控制换相顺序和通电换相。这一过程称为“脉冲分配”。例如:四相步进电机的单四拍工作方式,其各相通电顺序为A-B-C-D。通电控制脉冲必须严格按照这一顺序分别控制A、B、C、D相的通断,控制步进电机的转向。如果给定工作方式正序换相通电,则步进电机正转;如果按反序换相通电,则电机就反转。步进电机接收到一个控制脉冲,便转一步;再接收到一个脉冲,再转一步。两个脉冲的间隔越短,步进电机转得越快。调整控制器发出的脉冲频率,就可以对步进电机进行调速[4]。
控制系统完成的功能
步进电机的平稳起动、加速、减速和平稳停止
这是控制系统首先要实现的功能[7]。S7-200中,支持高速输出口PTO0/PTO1的线性加/减速,通过MicroWin向导程序,非常容易实现。实际上,以目前的情况,线性加/减速只能使用向导生成的程序,西门子没有公开独立可使用的指令。
定位控制功能
定位控制、调节和控制操作之间存在一些区别。步进电机不需要连续的位置控制,而在控制操作中得到广泛应用[9]。借助于CPU214所产生的集成脉冲输出和定位指令系统,确定相对一根轴的固定参考点,借助于一个输入字节的对偶码(Dual coding)给CPU指定定位角度,在程序中根据该码计算出所需的定位步数,再由CPU输出相关个数的控制脉冲,通过步进电机来实现相对的定位控制。
额定电流可调等角度恒力矩细分驱动方法的功能实现
步进电机的驱动方式有多种,如恒电压、恒电流等多种形式。而这些方式都存在一定的缺陷,特别是在低速运行时的振动大、噪声大和在步进电机自然振荡频率附近运行时易产生共振,且输出转矩随着步进电机的转速升高而下降等缺点。为了改变上述缺陷,本文采用了额定电流可调等角度恒力矩细分驱动方案。该方案最主要的优点是:步距角变小,分辨率高,提高了电机的定位精度、启动性能和高频输出转矩,减弱或消除了步进电机的低频振动,降低了步进电机在共振区工作的几率。一般细分驱动只改变相应绕组中电流的一部分,电动机的合成磁势也只是旋转步距角的一部分,绕组电流不是一个方波而是阶梯波,额定电流是台阶式的投入或切除,如图1所示。
其合成的矢量幅值是不断变化的,输出力矩也跟着不断变化,从而会引起滞后角的不断变化。当细分数很大、微步距角非常小时,滞后角变化的差值已大于所要求细分的微步距角,使得细分失去了意义。据此分析,采用建立数学关系同时改变两相电流,即Ia和Ib以某一数学关系同时变化,保证变化过程中合成矢量幅值始终不变。建立一种“额定电流可调的等角度恒力矩细分”驱动方法,以消除力距不断变化引起滞后角的问题。这种合成矢量幅值保持不变的数学模型为:当 Ia=Imcosx,Ib=Imsinx时(式中Im为电流额定值,Ia、Ib为实际的相电流,x由细分数决定),其合成矢量始终为圆的半径,即恒力距; 等角度是指合成的力臂每次旋转的角度一样;额定电流可调是指可满足各种系列电机的要求;细分为对额定电流的细分(如图2a和2b所示)。
步进电机 机器人 电路 电流 电压 电动机 PLC 传感器 比较器 单片机 集成电路 红外 电子 相关文章:
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 用MSP430单片机实现微波成像系统的扫描控制与数据采集(06-20)
- 基于可调式模拟激光脉冲的激光告警器在线检测仪(10-20)
- 单片机对仪表步进电机的细分控制(10-20)
- 使用L6506 实现步进电机的电流控制(12-10)
- 基于嵌入式Web服务器的智能温室监控系统(01-25)