使用L6506 实现步进电机的电流控制
时间:12-10
来源:互联网
点击:
L6506是一款可以检测并监控步进电机或其他相类似设备电流的线性集成电路。可与功率驱动级芯片像L293D、L298N,L6201/02/03配套使用,针对感性负载组成恒流驱动电路。
L6506可以针对两相双极或四相单极性电机配置。图1是L6506配套L298N实现的双极性电机驱动电路。图2中的电路实现了一个四相单极性电机驱动电路。在这两个电路中,L6506用于监控每个电机绕组内的电流。其工作原理是通过监测流过检测电阻(Rsense)上的电压来监测电流,利用脉宽调制控制使电流维持在某个设定的值。芯片内部的振荡器负责驱动双路斩波器,引脚1上的阻容网络就是用于设置工作频率,其计算方法如下:

R1 > 10 Kohm

图1. L6506在两相双极步进电机中的应用电路图
芯片内部振荡器提供脉冲信号,使两个触发器置位,然后触发器产生输出信号,将外部的功率驱动器激活。一旦输出被激活后,感性负载中的电流开始增加。当负载绕组中的电流达到预设峰值时,检测电阻(Rsense)上的电压等于输入的参考电压(Vref),对应的比较器将其触发器复位,这样就会使功率驱动器输出断开,并通过一个回流通道,使电流逐渐变弱,直到下一个振荡器脉冲出现。通过选择检测电阻(Rsense)的阻值和输入参考电压Vref利用下面的方程式,可以设定每个绕组内的峰值电流。其计算方法如下:


图2. L6506在四相单极步进电机中的应用电路图
振荡器的最小输出脉宽值是由振荡器(RC)的脉宽值或施加到SYN管脚上的信号来决定的,内部振荡器用于为同步输入(SYN)提供窄脉冲,在设计中应仔细考虑这个脉宽。在某些应用中,我们会使同步输入的脉宽比导通管开通(Turn on)延迟时间略长。这是因为开关噪声和反向恢复电流流过检测电阻(Rsense),使比较器检测到高于峰值的电流值。L6506是采用这样一种设计,内部的触发器是主导的器件,所以,每当同步输入是“低”状态时,即便比较器同时施加了复位信号,触发器的Q输出仍是“高”态。如果同步输入脉宽足够大,如图3所示,在发生开关瞬变事件时,能够阻止触发器置位,可使该器件忽略这个错误数据。当使用内部振荡器时,通过更改引脚1上的电容值,可以修改脉宽,提高电容值将会增大脉宽。

图3:负载电流和同步脉宽
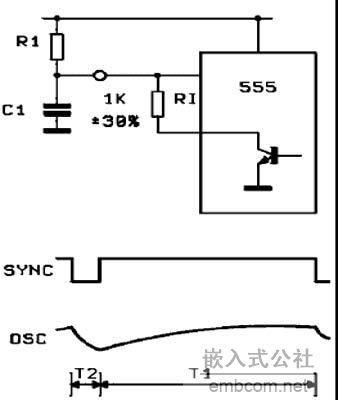
图4:振荡电路和波形
振荡器的器件选择是决定电路性能的关键,从图4中我们不难看出,除外部电阻和电容外,还要考虑内阻,工作频率方程式是:

通过观察图4,我们可以发现同步脉冲的有效时间(T2)和同步信号的无效时间(T1) 以及占空比的方程式 :

把方程4和5代入方程6,然后求解R1的阻值,可以得出下面的外部器件的方程式:

观看方程4,我们不难发现,当R1在最大值和Ri在最小值时, T2的脉宽最小。因此,当估算方程7时,为保证所需的脉宽,Ri的最小值应为700欧姆(1KW–30%)。
当同时带有多个负载时使振荡器保持同步,为避免多个器件使用的地线噪声问题,可以把每个器件的同步(SYNC)引脚都连至主器件的振荡输出引脚,没有使用的振荡器(R/C)的阻容引脚接地,如图5所示。
通过给同步(SYNC)引脚施加同步脉冲,可以使这些器件与外部电路同步。但输出的最小开通(ON)时间仍由输入脉冲决定,从而设定最小平均输出电流。

图5. 同步多个器件
L6506可配合一个全桥驱动器,用于双极性电机,如图1所示;或者配合一个四路达林顿复合晶体管阵列,用于四相单极性电机 ,如图2所示。对于每一种配置,都可以利用如图6所示的四相输入实现整步或半步控制。

图6. 步进电机驱动的输入信号
单极性电机的回流通道是经过一个二极管,而双极性电机的回流通道是经过一个二极管和一个下桥臂晶体驱动器。当实现一个半步电机控制时,L6506的两路输出在一相的半步中都将保持低态。这是因为,当驱动一个双极性电机时,电机绕组的电流衰减时间可能很长。所以可以将功率级(L298N)输出设为低,使得电流快速衰减。
因为每个通道的输入参考电压Vref都是独立的,可以独立设置每个负载的电流,因此,该器件可用于实现微步驱动或实现不同的的峰值电流和保持电流驱动,只需要通过改变Vref的值就可以实现。如果不想用昂贵的D/A器件来得到正弦波或可变的Vref,我们可以利用一种简单的方法来实现。将微控制器输出的PWM通过一个低通滤波器从而得到变化的Vref,如图7。假定PWM输出从0-5V。那么输出的电压是


图7:通过PWM得到可变的Vref
目前意法半导体采用新的BCD工艺,推出了POWERSPIN系列产品,其中L6207,L6227将斩波和功率驱动器集成到了一起来实现电流控制。其工作原理不同于L6506的恒定工作频率,采用的是恒定“OFF”时间来实现,其“ON”时间由电机线圈绕组的特性和供电电压决定,所以对于不同的负载其工作频率是变化的,但仍然采用斩波方法实现恒定电流控制。
作者:意法半导体公司Thomas Hopkins,原野
L6506可以针对两相双极或四相单极性电机配置。图1是L6506配套L298N实现的双极性电机驱动电路。图2中的电路实现了一个四相单极性电机驱动电路。在这两个电路中,L6506用于监控每个电机绕组内的电流。其工作原理是通过监测流过检测电阻(Rsense)上的电压来监测电流,利用脉宽调制控制使电流维持在某个设定的值。芯片内部的振荡器负责驱动双路斩波器,引脚1上的阻容网络就是用于设置工作频率,其计算方法如下:
R1 > 10 Kohm
图1. L6506在两相双极步进电机中的应用电路图
芯片内部振荡器提供脉冲信号,使两个触发器置位,然后触发器产生输出信号,将外部的功率驱动器激活。一旦输出被激活后,感性负载中的电流开始增加。当负载绕组中的电流达到预设峰值时,检测电阻(Rsense)上的电压等于输入的参考电压(Vref),对应的比较器将其触发器复位,这样就会使功率驱动器输出断开,并通过一个回流通道,使电流逐渐变弱,直到下一个振荡器脉冲出现。通过选择检测电阻(Rsense)的阻值和输入参考电压Vref利用下面的方程式,可以设定每个绕组内的峰值电流。其计算方法如下:
图2. L6506在四相单极步进电机中的应用电路图
振荡器的最小输出脉宽值是由振荡器(RC)的脉宽值或施加到SYN管脚上的信号来决定的,内部振荡器用于为同步输入(SYN)提供窄脉冲,在设计中应仔细考虑这个脉宽。在某些应用中,我们会使同步输入的脉宽比导通管开通(Turn on)延迟时间略长。这是因为开关噪声和反向恢复电流流过检测电阻(Rsense),使比较器检测到高于峰值的电流值。L6506是采用这样一种设计,内部的触发器是主导的器件,所以,每当同步输入是“低”状态时,即便比较器同时施加了复位信号,触发器的Q输出仍是“高”态。如果同步输入脉宽足够大,如图3所示,在发生开关瞬变事件时,能够阻止触发器置位,可使该器件忽略这个错误数据。当使用内部振荡器时,通过更改引脚1上的电容值,可以修改脉宽,提高电容值将会增大脉宽。
图3:负载电流和同步脉宽
图4:振荡电路和波形
振荡器的器件选择是决定电路性能的关键,从图4中我们不难看出,除外部电阻和电容外,还要考虑内阻,工作频率方程式是:
通过观察图4,我们可以发现同步脉冲的有效时间(T2)和同步信号的无效时间(T1) 以及占空比的方程式 :
把方程4和5代入方程6,然后求解R1的阻值,可以得出下面的外部器件的方程式:
观看方程4,我们不难发现,当R1在最大值和Ri在最小值时, T2的脉宽最小。因此,当估算方程7时,为保证所需的脉宽,Ri的最小值应为700欧姆(1KW–30%)。
当同时带有多个负载时使振荡器保持同步,为避免多个器件使用的地线噪声问题,可以把每个器件的同步(SYNC)引脚都连至主器件的振荡输出引脚,没有使用的振荡器(R/C)的阻容引脚接地,如图5所示。
通过给同步(SYNC)引脚施加同步脉冲,可以使这些器件与外部电路同步。但输出的最小开通(ON)时间仍由输入脉冲决定,从而设定最小平均输出电流。
图5. 同步多个器件
L6506可配合一个全桥驱动器,用于双极性电机,如图1所示;或者配合一个四路达林顿复合晶体管阵列,用于四相单极性电机 ,如图2所示。对于每一种配置,都可以利用如图6所示的四相输入实现整步或半步控制。
图6. 步进电机驱动的输入信号
单极性电机的回流通道是经过一个二极管,而双极性电机的回流通道是经过一个二极管和一个下桥臂晶体驱动器。当实现一个半步电机控制时,L6506的两路输出在一相的半步中都将保持低态。这是因为,当驱动一个双极性电机时,电机绕组的电流衰减时间可能很长。所以可以将功率级(L298N)输出设为低,使得电流快速衰减。
因为每个通道的输入参考电压Vref都是独立的,可以独立设置每个负载的电流,因此,该器件可用于实现微步驱动或实现不同的的峰值电流和保持电流驱动,只需要通过改变Vref的值就可以实现。如果不想用昂贵的D/A器件来得到正弦波或可变的Vref,我们可以利用一种简单的方法来实现。将微控制器输出的PWM通过一个低通滤波器从而得到变化的Vref,如图7。假定PWM输出从0-5V。那么输出的电压是
图7:通过PWM得到可变的Vref
目前意法半导体采用新的BCD工艺,推出了POWERSPIN系列产品,其中L6207,L6227将斩波和功率驱动器集成到了一起来实现电流控制。其工作原理不同于L6506的恒定工作频率,采用的是恒定“OFF”时间来实现,其“ON”时间由电机线圈绕组的特性和供电电压决定,所以对于不同的负载其工作频率是变化的,但仍然采用斩波方法实现恒定电流控制。
作者:意法半导体公司Thomas Hopkins,原野
步进电机 电流 集成电路 电路 电阻 电压 振荡器 电路图 比较器 电容 二极管 PWM 滤波器 意法半导体 半导体 相关文章:
- 基于ARM与DSP的嵌入式运动控制器设计(04-25)
- 用MSP430单片机实现微波成像系统的扫描控制与数据采集(06-20)
- 基于可调式模拟激光脉冲的激光告警器在线检测仪(10-20)
- 单片机对仪表步进电机的细分控制(10-20)
- 基于嵌入式Web服务器的智能温室监控系统(01-25)
- 激光微加工系统及基于DSP+FPGA的控制单元的研究(03-05)