一种改进的多传感器加权融合算法
时间:12-18
来源:互联网
点击:
引言
多传感器数据融合是近几年迅速发展的一门信息综合处理技术,它将来自多传感器或是多源的信息和数据进行综合处理,从而得出更为准确可信的结论。此项技术的应用不仅可以提高系统的精度和可靠度,还可以提高系统的量测范围、增加系统的可信度、缩短系统响应时间。在数据融合中,加权融合算法是较为成熟的一种融合算法,该算法的最优性、无偏性、均方误差最小等特性在许多研究结果中都已经被证明。加权融合算法的核心问题是如何确定权重,权重的选取直接影响融合结果。
常用的方法有加权平均法,加权平均是一种最简单和直观的方法,即将多个传感器提供的冗余信息进行加权平均后作为融合值。该方法能实时处理动态的原始数据,但是权重的确定具有一定的主观性,在实际应用中,效果并未达到最优。本文采用二次加权的方法,并引入最优比例权重的概念,先对单个传感器进行加权,再对整体进行加权并导出基于改进算法的加权融合公式。通过仿真,并与加权平均融合算法中采用的等权重融合算法进行比较,验证该算法的有效性。
多传感器数据加权融合
加权数据融合是多个传感器对某一个环境中的同一特征参数的数据进行量测,兼顾每个传感器的局部估计,按某一原则给每个传感器制定权重,最后通过加权综合所有的局部估计得到一个全局的最佳估计值。
加权平均融合算法
假设在n个传感器的融合系统中,传感器s1,s2,…,sn对同一个目标进行状态估计,第i个传感器在第k时刻的局部状态估计值为,(i=1, 2, …, n)。假定是无偏估计,且任意两个传感器局部估计误差之间互不相关。
设各个传感器的权重分别是w1, w2, …wn,则融合后的状态估计值为和权重满足的条件为:

改进的加权融合算法
提出改进的加权融合算法采用二次加权的方法,并引入了最优比例权重的概念,先对单个传感器进行加权,再对整体进行加权,目的是使算法性能达到最优。
单个传感器一次加权
获得观测数据的方法一般是采用单个传感器,由于传感器的系统方差是固定不变的,所以减小估计均方误差的唯一方法就是增加观测数据,而增加观测数据就会使运算量增大并且收敛速度降低,多传感器数据融合可以解决此问题。但是在多个传感器中,一个或者更多的传感器在观测噪声很大或是估计值发散的情况下,进行数据融合,同样会使融合系统性能不稳定并导致严重的估计偏差。所以,在进行多传感器数据融合之前,要对单个传感器的状态估计值进行加权,使估计值快速收敛目的是为了给融合系统输入稳定的融合数据,使融合后的估计值达到最优状态。
单传感器加权思想:在某时刻方差最小情况下,利用此时刻的状态估计值与此时刻观测值与此时刻的状态估计值的和的比值作为权重,定义它为最优比例权重。用此权重去加权,目的是校正那些发散或是估计偏差较大的估计值,使其收敛,为多传感器数据融合系统提供良好稳定的数据源。

Wk为在第k时刻方差最小情况下的最优比例权重;vj为t个时刻的观测值与状态估计值之和;为加权后的t个时刻的状态估计值。
多传感器二次加权融合
多传感器数据融合目的是使对目标的估计精度达到更高,但由于传感器的方差固定不变,所以,在进行融合时要考虑传感器的方差对融合权重的影响。设多传感器融合权重为:

以给出一个带有约束条件的多变量的目标函数:


改进的加权融合算法的运算流程及计算机仿真实验
算法的运算流程
1.先对多传感器中的单个传感进行处理,单传感器对一个目标不同时刻的状态估计值多采用Kalman递归滤波算法,根据初始的误差方阵P0,根据递归公式,可以计算出t个时刻的误差方阵PK(k=1, 2, ..., t),计算出mintracePK的时刻k。
2.开始根据初始值进行递归计算,根据计算t个时刻的vt,然后根据第一步的计算,可以确定k时刻的PK最小,然后计算出最优比例权重。
3.对发散数据或是估计精度差的数据,我们根据最优比例权重,对其进行加权,根据公式(4),计算出加权后的状态估计值(j=1, 2, ..., t)。
4.由每个传感器的方差并根据公式(11),可以计算出融合权重ai,将上一步骤中的经过加权的各个传感器的状态估计值进行融合,根据公式(12),计算出融合值。
从以上运算流程中可以看出,对于每个传感器只需在其方差最小的情况下,就可计算出各自的最优比例权重。然后再根据它们的固定方差,计算出融合权重。
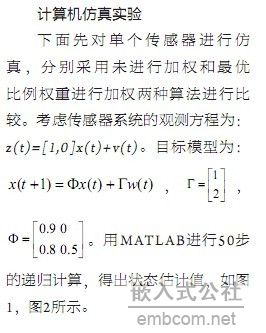
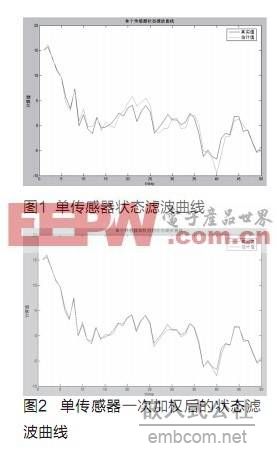
通过仿真,对图1和图2进行比较可以看出,采用最优比例权重进行加权处理的单个传感器的估计精度要高于未采用最优比例权重进行加权的单个传感器的估计精度,此方法可以提高估计精度。
多传感器数据融合是近几年迅速发展的一门信息综合处理技术,它将来自多传感器或是多源的信息和数据进行综合处理,从而得出更为准确可信的结论。此项技术的应用不仅可以提高系统的精度和可靠度,还可以提高系统的量测范围、增加系统的可信度、缩短系统响应时间。在数据融合中,加权融合算法是较为成熟的一种融合算法,该算法的最优性、无偏性、均方误差最小等特性在许多研究结果中都已经被证明。加权融合算法的核心问题是如何确定权重,权重的选取直接影响融合结果。
常用的方法有加权平均法,加权平均是一种最简单和直观的方法,即将多个传感器提供的冗余信息进行加权平均后作为融合值。该方法能实时处理动态的原始数据,但是权重的确定具有一定的主观性,在实际应用中,效果并未达到最优。本文采用二次加权的方法,并引入最优比例权重的概念,先对单个传感器进行加权,再对整体进行加权并导出基于改进算法的加权融合公式。通过仿真,并与加权平均融合算法中采用的等权重融合算法进行比较,验证该算法的有效性。
多传感器数据加权融合
加权数据融合是多个传感器对某一个环境中的同一特征参数的数据进行量测,兼顾每个传感器的局部估计,按某一原则给每个传感器制定权重,最后通过加权综合所有的局部估计得到一个全局的最佳估计值。
加权平均融合算法
假设在n个传感器的融合系统中,传感器s1,s2,…,sn对同一个目标进行状态估计,第i个传感器在第k时刻的局部状态估计值为,(i=1, 2, …, n)。假定是无偏估计,且任意两个传感器局部估计误差之间互不相关。
设各个传感器的权重分别是w1, w2, …wn,则融合后的状态估计值为和权重满足的条件为:
改进的加权融合算法
提出改进的加权融合算法采用二次加权的方法,并引入了最优比例权重的概念,先对单个传感器进行加权,再对整体进行加权,目的是使算法性能达到最优。
单个传感器一次加权
获得观测数据的方法一般是采用单个传感器,由于传感器的系统方差是固定不变的,所以减小估计均方误差的唯一方法就是增加观测数据,而增加观测数据就会使运算量增大并且收敛速度降低,多传感器数据融合可以解决此问题。但是在多个传感器中,一个或者更多的传感器在观测噪声很大或是估计值发散的情况下,进行数据融合,同样会使融合系统性能不稳定并导致严重的估计偏差。所以,在进行多传感器数据融合之前,要对单个传感器的状态估计值进行加权,使估计值快速收敛目的是为了给融合系统输入稳定的融合数据,使融合后的估计值达到最优状态。
单传感器加权思想:在某时刻方差最小情况下,利用此时刻的状态估计值与此时刻观测值与此时刻的状态估计值的和的比值作为权重,定义它为最优比例权重。用此权重去加权,目的是校正那些发散或是估计偏差较大的估计值,使其收敛,为多传感器数据融合系统提供良好稳定的数据源。
Wk为在第k时刻方差最小情况下的最优比例权重;vj为t个时刻的观测值与状态估计值之和;为加权后的t个时刻的状态估计值。
多传感器二次加权融合
多传感器数据融合目的是使对目标的估计精度达到更高,但由于传感器的方差固定不变,所以,在进行融合时要考虑传感器的方差对融合权重的影响。设多传感器融合权重为:
以给出一个带有约束条件的多变量的目标函数:
改进的加权融合算法的运算流程及计算机仿真实验
算法的运算流程
1.先对多传感器中的单个传感进行处理,单传感器对一个目标不同时刻的状态估计值多采用Kalman递归滤波算法,根据初始的误差方阵P0,根据递归公式,可以计算出t个时刻的误差方阵PK(k=1, 2, ..., t),计算出mintracePK的时刻k。
2.开始根据初始值进行递归计算,根据计算t个时刻的vt,然后根据第一步的计算,可以确定k时刻的PK最小,然后计算出最优比例权重。
3.对发散数据或是估计精度差的数据,我们根据最优比例权重,对其进行加权,根据公式(4),计算出加权后的状态估计值(j=1, 2, ..., t)。
4.由每个传感器的方差并根据公式(11),可以计算出融合权重ai,将上一步骤中的经过加权的各个传感器的状态估计值进行融合,根据公式(12),计算出融合值。
从以上运算流程中可以看出,对于每个传感器只需在其方差最小的情况下,就可计算出各自的最优比例权重。然后再根据它们的固定方差,计算出融合权重。
通过仿真,对图1和图2进行比较可以看出,采用最优比例权重进行加权处理的单个传感器的估计精度要高于未采用最优比例权重进行加权的单个传感器的估计精度,此方法可以提高估计精度。
- 多核及虚拟化技术在工业和安全领域的应用(05-23)
- 基于ARM核的AT75C220及其在指纹识别系统中的应用(05-24)
- 基于音频信号的轴承故障诊断方法(03-17)
- 采用信号调理IC驱动应变片电桥传感器(05-26)
- 基于nRF2401智能无线火灾监控系统设计(04-01)
- 家居安防无线监控报警系统(04-02)