由DSP芯片生成电压空间矢量脉宽调制波
时间:11-25
来源:互联网
点击:
1 引 言
在电气传动中,广泛应用脉宽调制(PWM-Pulse Width Modulation)控制技术。随着电气传动系统对其控制性能的要求不断提高,人们对PWM控制技术展开了深入研究:从最初追求电压波形正弦,到电流波形正弦,再到磁通的正弦,PWM控制技术不断创新和完善。本文所采用的电压空间矢量(SVPWM-Space Vector PWM)就是一种优化的PWM方法,能明显减小逆变器输出电流的谐波成分和电机的谐波损耗,降低脉动转矩,由于其控制简单,数字化实现方便,目前已有替代传统SPWM(SinusoidalPWM)的趋势。微机技术的不断发展使得数字化PWM有了实现的可能和广阔的应用前景。本文采用美国德州仪器(TI)公司专为电机控制而推出的数字信号处理器(DPS)TMS320C24x系列中的TMS320F240实现SVPWM变频调速。本文介绍由TMS320F240实现SVPWM的两种方法。一种用TMS320F240的常规比较功能实现。称为SWSVPWM(软件SVPWM);另一种用TMS320F240固有的生成SVPWM的硬件电路实现,称为HWSVWM(硬件SVPWM)。
2 SVPWM的基本原理及特点
电压空间矢量法(SVPWM,称磁通正弦PWM)是从电动机的角度出发,着眼于使电机获得幅值恒定的圆形磁场,即正弦磁通。它以三相对称正弦波电压供电时交流电动机的理想圆形磁通轨迹为基准,用逆变器不同的开关模式产生的实际磁通去逼近基准磁通圆,从而达到较高的控制性能。三相电压源型逆变桥的上桥臂和下桥臂开关状态互补,故可用3个上桥臂的功率器件的开关状态描述逆变器的工作状态,记功率器件开通状态为“1”,关断状态为“0”,则上桥臂的开关状态有8种组合,可用矢量[a,b,c]t表示,分别为[0 0 0]t,[0 0 1]t,…,[1 1 1]t。
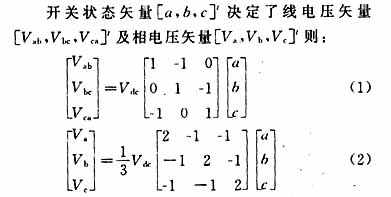
得到相电压矢量后,再应用电机统一理论和abc-dq坐标转换:
可以将abc坐标的8种开关状态矢量转换为dq坐标的8种电压矢量,分别记为U0,U60,U120,U180,U240,U300,U000,U111,称为基本电压空间矢量,其中U000,U111为零矢量,如图1所示。
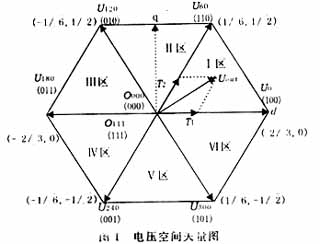
SVPWM控制技术的目标就是要通过控制开关状态组合,将空间电压矢量Uout控制为按设定的参数作圆形旋转。在某个时刻,Uout旋转在某个区域中,可由组成这个区域的两个非零矢量Ux和 分别按对应的作用时间T1、T2组合得到所要求的Uout输出。从一个空间电压矢量旋转到另一个矢量的过程中,应当遵循功率器件的开关状态变化最小的原则,即应当只有一个功率器件的开关状态发生变化。基于这一原则,可以选定各基本空间电压矢量之间的旋转方向,先作用的Ux被称为主矢量,后作用的被称为辅矢量。于是Uout可以表示为
分别按对应的作用时间T1、T2组合得到所要求的Uout输出。从一个空间电压矢量旋转到另一个矢量的过程中,应当遵循功率器件的开关状态变化最小的原则,即应当只有一个功率器件的开关状态发生变化。基于这一原则,可以选定各基本空间电压矢量之间的旋转方向,先作用的Ux被称为主矢量,后作用的被称为辅矢量。于是Uout可以表示为

由于T1、T2之和小于TP之和小于TP(载波周期),需要用零矢量U0 0 0或U1 1 1插入,插入时间为T0,T1+T2+T0=TP。零矢量对Uout的大小无影响,仅对设定的频率起到补偿作用。在很高的开关频率下,每个转换周期中Uout可以看成是常数,由上式可写成:

用该式可以在dq平面中,分别求出T1,T2。
电压空间矢量Uout的大小代表三相电机线电压的有效值,其频率也是三相电机的频率,控制Uout的大小、旋转速度和方向就能实现变频调速。图1所示由基本电压空间矢量组成的六边形的内切圆是Uout所能达到最大轨迹,所以Uout的最大值为 相应的电机的线电压和相电压为和Vdc/
相应的电机的线电压和相电压为和Vdc/ ,这是普通SPWM最大值的
,这是普通SPWM最大值的 倍,因此SVPWM的直流电压利用率也是最高的。
倍,因此SVPWM的直流电压利用率也是最高的。
3 基于TMS320F240生成SVPWM
TMS320F24x是美国TI公司新开发的专门用于电机控制的DSP芯片,除了DSP所固有的高速计算特性(50ns的指令周期)、硬件乘法器以外,还内部集成了三相PWM波形发生器,两者的结合,使我们完全能通过实时计算来产生任意频率的SVPWM波。
TMS320C24x系列产品为电机控制设计了专门的PWM生成电路,如图2所示。
从片内生成PWM的硬件结构图2中可以看到PWM生成由特定的寄存器分别控制:
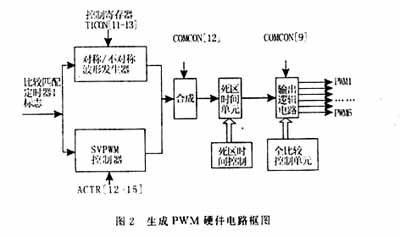
(1)COMCON[12]控制PWM输出是常规比较控制PWM方式(SWSVPWM),还是硬件SVPWM方式(HWSVPWM)。
(2)ACTR[12-15]中是当前矢量,根据Uout的位置写入相应的值,采用HWSVPWM时使用。
(3)T1CON[11-13]控制生成对称或不对称的PWM波形,死区时间设置DBTCON,在时钟为50ns时,设置的死区时间范围是0~102.4μs。
(4)COMCON控制PWM输出或高阻态输出,可用于系统出现故障时及时保护。
(5)CMPRx(x=1,2,3)3个比较寄存器分别对应何时开通a、b、c三相,其值的大小由主、辅矢量和零矢量的作用时间决定,采用SWSVPWM时使用。
3.1 SWSVPWM生成方法
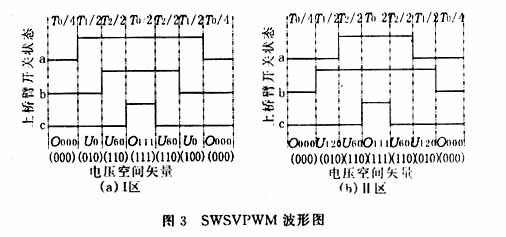
采用软件生成SVPWM的过程是,当定时器的计数器累加到等于CMPRx=1,2,3)的值时,就会改变空间矢量对应的控制信号输出。例如在CMPR1中写入0.25T0,CMPR2中写入0.25T0+0.5T1,CMPR3中写入0.25T0+0.5T1+0.5T2,定时器的计数器值一一与CMPRx相匹配,就会输出图3a所示的PWM波形。因此,生成SVPWM的程序——定时器中断子程序要完成的任务已经非常明确了。在主程序中根据控制策略计算出需要的频率,等待中断的产生。在定时器中断子程序中,根据此时的f和Uout的当前位置确定出下一个载波周期中Uout的位置,确定主矢量和辅矢量,并计算出它们分别作出的时间T1、T2,得到发生区配的时间值,写入到CMPRx中。如图3所示,Ⅰ区主矢量是U0,辅矢量是U±60,Ⅱ区主矢量是U120,辅矢量是U60,其它区域类推。
在电气传动中,广泛应用脉宽调制(PWM-Pulse Width Modulation)控制技术。随着电气传动系统对其控制性能的要求不断提高,人们对PWM控制技术展开了深入研究:从最初追求电压波形正弦,到电流波形正弦,再到磁通的正弦,PWM控制技术不断创新和完善。本文所采用的电压空间矢量(SVPWM-Space Vector PWM)就是一种优化的PWM方法,能明显减小逆变器输出电流的谐波成分和电机的谐波损耗,降低脉动转矩,由于其控制简单,数字化实现方便,目前已有替代传统SPWM(SinusoidalPWM)的趋势。微机技术的不断发展使得数字化PWM有了实现的可能和广阔的应用前景。本文采用美国德州仪器(TI)公司专为电机控制而推出的数字信号处理器(DPS)TMS320C24x系列中的TMS320F240实现SVPWM变频调速。本文介绍由TMS320F240实现SVPWM的两种方法。一种用TMS320F240的常规比较功能实现。称为SWSVPWM(软件SVPWM);另一种用TMS320F240固有的生成SVPWM的硬件电路实现,称为HWSVWM(硬件SVPWM)。
2 SVPWM的基本原理及特点
电压空间矢量法(SVPWM,称磁通正弦PWM)是从电动机的角度出发,着眼于使电机获得幅值恒定的圆形磁场,即正弦磁通。它以三相对称正弦波电压供电时交流电动机的理想圆形磁通轨迹为基准,用逆变器不同的开关模式产生的实际磁通去逼近基准磁通圆,从而达到较高的控制性能。三相电压源型逆变桥的上桥臂和下桥臂开关状态互补,故可用3个上桥臂的功率器件的开关状态描述逆变器的工作状态,记功率器件开通状态为“1”,关断状态为“0”,则上桥臂的开关状态有8种组合,可用矢量[a,b,c]t表示,分别为[0 0 0]t,[0 0 1]t,…,[1 1 1]t。
得到相电压矢量后,再应用电机统一理论和abc-dq坐标转换:
可以将abc坐标的8种开关状态矢量转换为dq坐标的8种电压矢量,分别记为U0,U60,U120,U180,U240,U300,U000,U111,称为基本电压空间矢量,其中U000,U111为零矢量,如图1所示。
SVPWM控制技术的目标就是要通过控制开关状态组合,将空间电压矢量Uout控制为按设定的参数作圆形旋转。在某个时刻,Uout旋转在某个区域中,可由组成这个区域的两个非零矢量Ux和
分别按对应的作用时间T1、T2组合得到所要求的Uout输出。从一个空间电压矢量旋转到另一个矢量的过程中,应当遵循功率器件的开关状态变化最小的原则,即应当只有一个功率器件的开关状态发生变化。基于这一原则,可以选定各基本空间电压矢量之间的旋转方向,先作用的Ux被称为主矢量,后作用的被称为辅矢量。于是Uout可以表示为由于T1、T2之和小于TP之和小于TP(载波周期),需要用零矢量U0 0 0或U1 1 1插入,插入时间为T0,T1+T2+T0=TP。零矢量对Uout的大小无影响,仅对设定的频率起到补偿作用。在很高的开关频率下,每个转换周期中Uout可以看成是常数,由上式可写成:
用该式可以在dq平面中,分别求出T1,T2。
电压空间矢量Uout的大小代表三相电机线电压的有效值,其频率也是三相电机的频率,控制Uout的大小、旋转速度和方向就能实现变频调速。图1所示由基本电压空间矢量组成的六边形的内切圆是Uout所能达到最大轨迹,所以Uout的最大值为
相应的电机的线电压和相电压为和Vdc/,这是普通SPWM最大值的倍,因此SVPWM的直流电压利用率也是最高的。3 基于TMS320F240生成SVPWM
TMS320F24x是美国TI公司新开发的专门用于电机控制的DSP芯片,除了DSP所固有的高速计算特性(50ns的指令周期)、硬件乘法器以外,还内部集成了三相PWM波形发生器,两者的结合,使我们完全能通过实时计算来产生任意频率的SVPWM波。
TMS320C24x系列产品为电机控制设计了专门的PWM生成电路,如图2所示。
从片内生成PWM的硬件结构图2中可以看到PWM生成由特定的寄存器分别控制:
(1)COMCON[12]控制PWM输出是常规比较控制PWM方式(SWSVPWM),还是硬件SVPWM方式(HWSVPWM)。
(2)ACTR[12-15]中是当前矢量,根据Uout的位置写入相应的值,采用HWSVPWM时使用。
(3)T1CON[11-13]控制生成对称或不对称的PWM波形,死区时间设置DBTCON,在时钟为50ns时,设置的死区时间范围是0~102.4μs。
(4)COMCON控制PWM输出或高阻态输出,可用于系统出现故障时及时保护。
(5)CMPRx(x=1,2,3)3个比较寄存器分别对应何时开通a、b、c三相,其值的大小由主、辅矢量和零矢量的作用时间决定,采用SWSVPWM时使用。
3.1 SWSVPWM生成方法
采用软件生成SVPWM的过程是,当定时器的计数器累加到等于CMPRx=1,2,3)的值时,就会改变空间矢量对应的控制信号输出。例如在CMPR1中写入0.25T0,CMPR2中写入0.25T0+0.5T1,CMPR3中写入0.25T0+0.5T1+0.5T2,定时器的计数器值一一与CMPRx相匹配,就会输出图3a所示的PWM波形。因此,生成SVPWM的程序——定时器中断子程序要完成的任务已经非常明确了。在主程序中根据控制策略计算出需要的频率,等待中断的产生。在定时器中断子程序中,根据此时的f和Uout的当前位置确定出下一个载波周期中Uout的位置,确定主矢量和辅矢量,并计算出它们分别作出的时间T1、T2,得到发生区配的时间值,写入到CMPRx中。如图3所示,Ⅰ区主矢量是U0,辅矢量是U±60,Ⅱ区主矢量是U120,辅矢量是U60,其它区域类推。
PWM 电压 电流 逆变器 德州仪器 电路 电动机 DSP 相关文章:
- 单片机的比例电磁铁控制技术(10-30)
- 用FPGA实现多路PWM输出的接口设计与仿真(05-05)
- 利用单片机PWM信号进行舵机控制(03-01)
- 寻迹小车中分布式控制系统的设计(03-22)
- 大牛谈数字电源设计与实现技术(05-29)
- 基于ARM的超声波发射与控制电路设计(08-13)