基于MC9S12DG128单片机的智能寻迹车设计
时间:11-04
来源:互联网
点击:
3.2 智能车平稳性控制
为了避免智能车发生侧滑现象,应在智能车上安装加速度传感器,以检测是否发生侧滑。车速为v,转向角为δ,车体质量为m,轴距为l,当理想转向时,向心加速度为a,则a=mv2tanδ/l。当加速度传感器反馈回的实际加速度a*小于理论加速度a时(实际中应当保持一定的死区),表明智能车系统存在侧滑现象。这时便命令智能移动小车减速,速度参考量为

3.3 舵机转向控制
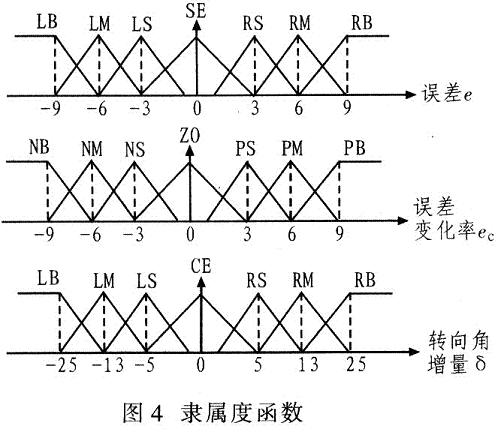
系统使用模糊控制算法控制智能车转向。传感器检测的重点是转向角误差,当转向角误差相同时,不同的误差变化率反映不同的轨道半径,因此,该设计还检测转向角误差变化率。当误差量很小,且误差变化率不变时,则判定为智能小车正沿着引导线行驶,则机器人小车沿直线行进;若误差变化率较大时,表明智能小车正在偏离引导线,此时,需对航向角做相应调整。通过CCD图像传感器检测白色地面上的黑线,根据返回的信号得出驾驶角误差和误差变化率,将CCD图像传感器视觉中心的误差和误差变化率作为控制器的输入,分别用e和ec表示;输出为驾驶角,用δ表示。模糊语言值分别选为:e:{LB,LM,LS,CE,RS,RM,RB};ec:{PB,PM,PS,Z0,NS,NM,NB};δ:{LB,LM,LS,CE,RS,RM,RB}。隶属度函数采用三角形,如图4所示。交叠系数β=(c1一a2)/(c2-b1),取0.75。根据驾驶经验建立规则库进行模糊推理后.利用重心法进行反模糊化得出舵机所要转的角度。
3.4 智能车控制流程
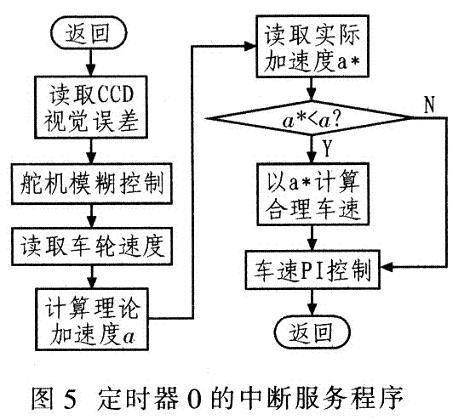
设计中,程序初始化完成后便进入空闲模式,等待中断发生。中断包括车轮转速计数器中断、CCD图像捕捉中断和以10 ms为周期的定时器0中断。驱动电机和舵机的PWM控制信号由单片机的PWM模块自动产生,其定时器0的中断服务程序如图5所示。
4 结语
以MC9S12DG128作为控制核心,设计自主寻迹的智能车控制系统,在检测到智能车运动信息和道路信息的基础上,采用模糊控制算法控制舵机转向,通过转速PID调节的方式控制直流电机。实验证明:该智能车在白色的跑道上能沿着一定宽度任意弧度的黑色引导线以较快的速度平稳地行驶,寻迹效果良好,速度和转向控制响应快,系统的稳定性和抗干扰能力强,速度可以达到1.5 m/s,此方案已应用于全国智能车大赛。
为了避免智能车发生侧滑现象,应在智能车上安装加速度传感器,以检测是否发生侧滑。车速为v,转向角为δ,车体质量为m,轴距为l,当理想转向时,向心加速度为a,则a=mv2tanδ/l。当加速度传感器反馈回的实际加速度a*小于理论加速度a时(实际中应当保持一定的死区),表明智能车系统存在侧滑现象。这时便命令智能移动小车减速,速度参考量为
3.3 舵机转向控制
系统使用模糊控制算法控制智能车转向。传感器检测的重点是转向角误差,当转向角误差相同时,不同的误差变化率反映不同的轨道半径,因此,该设计还检测转向角误差变化率。当误差量很小,且误差变化率不变时,则判定为智能小车正沿着引导线行驶,则机器人小车沿直线行进;若误差变化率较大时,表明智能小车正在偏离引导线,此时,需对航向角做相应调整。通过CCD图像传感器检测白色地面上的黑线,根据返回的信号得出驾驶角误差和误差变化率,将CCD图像传感器视觉中心的误差和误差变化率作为控制器的输入,分别用e和ec表示;输出为驾驶角,用δ表示。模糊语言值分别选为:e:{LB,LM,LS,CE,RS,RM,RB};ec:{PB,PM,PS,Z0,NS,NM,NB};δ:{LB,LM,LS,CE,RS,RM,RB}。隶属度函数采用三角形,如图4所示。交叠系数β=(c1一a2)/(c2-b1),取0.75。根据驾驶经验建立规则库进行模糊推理后.利用重心法进行反模糊化得出舵机所要转的角度。
3.4 智能车控制流程
设计中,程序初始化完成后便进入空闲模式,等待中断发生。中断包括车轮转速计数器中断、CCD图像捕捉中断和以10 ms为周期的定时器0中断。驱动电机和舵机的PWM控制信号由单片机的PWM模块自动产生,其定时器0的中断服务程序如图5所示。
4 结语
以MC9S12DG128作为控制核心,设计自主寻迹的智能车控制系统,在检测到智能车运动信息和道路信息的基础上,采用模糊控制算法控制舵机转向,通过转速PID调节的方式控制直流电机。实验证明:该智能车在白色的跑道上能沿着一定宽度任意弧度的黑色引导线以较快的速度平稳地行驶,寻迹效果良好,速度和转向控制响应快,系统的稳定性和抗干扰能力强,速度可以达到1.5 m/s,此方案已应用于全国智能车大赛。
汽车电子 飞思卡尔 单片机 传感器 电源管理 总线 PWM 电压 红外 二极管 电路 比较器 电阻 电流 ADI 机器人 相关文章:
- 利用蓝牙技术和远程信息控制单元实现汽车诊断(11-13)
- 汽车网络的分类及发展趋向(11-13)
- 多核嵌入式处理技术推动汽车技术发展(11-18)
- CAN总线的客车轻便换档系统设计与实现(02-13)
- LVDS在汽车电子中的应用(08-21)
- 应用处理器连接汽车和消费电子两大领域(02-26)