基于双CPU的实时光电图像识别系统
时间:05-24
来源:互联网
点击:
提出并设计一种新型的基于双CPU技术的光电图像识别系统,该系统主要由目标图像采集与处理模块、光电相关联合变换模块以及自动识别模块组成。采用TMS320C6416与FPGA完成目标图像的采集与处理.采用ARM9处理器S3C2440完成对相关功率谱的采集与目标图像识别。与传统光电图像识别系统相比,该系统实时性和精度更高,并可实现智能化和网络化。
光电混合模式识别以其高速并行处理和无串扰的优点成为实现模式识别实用化和实时化的重要途径,其在目标识别、指纹识别、光纤检测、工业零件识别、汽车牌照识别等领域得到了广泛的研究和应用[1.2],并取得了很好的识别效果。
但在实际应用中,待识别的目标图像需要经过图像预处理和畸变处理等操作。针对图像的实时处理要求,本文将联合变换相关识别系统与数字信号处理中的双CPU技术相结合,采用“FPGA+DSP+ARM”架构,研究与设计一种新型的光电混合图像识别系统。利用TMS320C6416与FPGA完成目标图像的采集与处理,利用ARM9处理器S3C2440完成对相关功率谱的采集与目标图像识别,从而实现畸变不变模式识别的快速和准确性。并实现了该系统的智能化和网络化。
该光电混合图像识别系统每秒能处理25帧图像,可实现真正的动态图像识别,因而对图像识别有很好的实用性。
1 光电混合图像识别系统
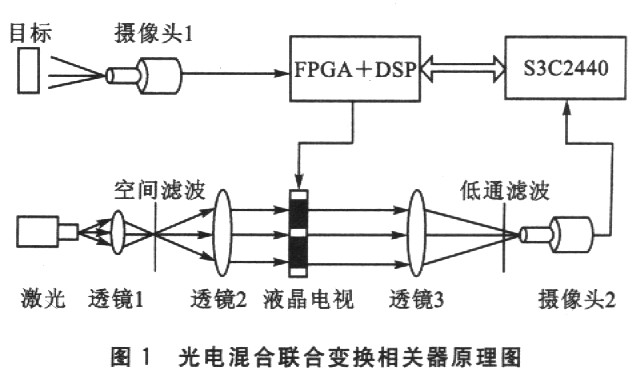
光电混合图像识别系统是基于光电混合联合变换相关器的一种系统,本文提出并设计的光电混合图像识别系统的结构框图如图1所示。
然后,DSP将处理后的目标图像和参考图像构成的联合输入图像实时输出到液晶电视上,联合图像经过激光光束的照射后,经傅里叶变换透镜3后,形成联合图像傅里叶频谱。该频谱经低通滤波后,得到所需的中心频谱[3],并通过摄像头2接收进入ARM9处理器S3C2440,来完成图像频谱的振幅调制及傅里叶逆变换的处理,得到所需互相关结果。由于真目标互相关信号较强,假目标的互相关信号很弱,可以通过设定阈值来判断真假目标图像,即当相关结果大于阈值时,识为真目标,小于阈值时,识为假目标。当判为假目标时,通过通信接口控制DSP继续进行图像采集与处理,实现下一个目标的图像识别,直至判别出真目标。
2 系统设计
该光电图像识别系统主要由目标图像采集与处理模块、光电相关联合变换模块以及自动识别模块组成,采用TMS320c6416DSP与FPGA来完成目标图像的采集与处理,采用ARM9处理器S3C2440来完成对相关功率谱的采集与目标图像识别。
2.1 TMS320C6416
C64x是TI公司推出C6000系列DSP中的最新成员,采用了VelociTI1.2结构,其主要在内部CPU功能单元、通用寄存器组及其数据通路等方面进行了较大的改进。C64x具有8个相互独立的功能单元,其中包含6个支持单周期内单32位、双16位或4个8位数据操作的算术逻辑单元,以及2个支持单周期双16×16位或4个8×8位数据操作的乘法器;内部CPU的通用寄存器组含有32个32位寄存器,支持8位和64位定点数据,并且寄存器A0也可用作条件寄存器;通用寄存器组内部有两条交叉通路,且都可以通过交叉通路访问另一侧的寄存器组;C64x还能够利用非排列的存取指令访问任意字节边界的字或双字。
与C62x相比,C64x平均每条指令在每个时钟周期内的运算能力增加了7.6倍。由于C64x支持双16位和8位数据以及时钟频率的提高,使得其图像处理能力比C62x提高了15倍左右。C64x为程序和地址两级片内存储器结构。一级存储器由程序(L1P)和数据(L1D)缓存组成。其中L1P为512组32B的16KB直接映像式缓存,L1D为128组64B的16KB两路组相联式缓存。C64x具有与C621x、C67lx不同的存储体结构,其存储体位于32位边界,因此对于相同存储体访问时,地址总线的3LSBs相同。另外,C64x具有丰富的外设资源,其中包括:64通道的增强型存储器直接存取(EDMA)控制器;64位/16位数据总线的外部存储器接口EMIFA/EMIFB;33MHz、32位PCI接口和针对异步传输模式的UTOPLA接口;16位或32位主机端接口;3个多通道缓冲串行口等。
内部结构的改进、并行处理能力的提高及丰富的外设资源,使得C64x在图像处理领域具有巨大的开发潜力。为提高系统实时性能,本文采用主频400 MHz的TMS320C6416GLZ作为目标图像处理单元来设计该识别系统。
光电混合模式识别以其高速并行处理和无串扰的优点成为实现模式识别实用化和实时化的重要途径,其在目标识别、指纹识别、光纤检测、工业零件识别、汽车牌照识别等领域得到了广泛的研究和应用[1.2],并取得了很好的识别效果。
但在实际应用中,待识别的目标图像需要经过图像预处理和畸变处理等操作。针对图像的实时处理要求,本文将联合变换相关识别系统与数字信号处理中的双CPU技术相结合,采用“FPGA+DSP+ARM”架构,研究与设计一种新型的光电混合图像识别系统。利用TMS320C6416与FPGA完成目标图像的采集与处理,利用ARM9处理器S3C2440完成对相关功率谱的采集与目标图像识别,从而实现畸变不变模式识别的快速和准确性。并实现了该系统的智能化和网络化。
该光电混合图像识别系统每秒能处理25帧图像,可实现真正的动态图像识别,因而对图像识别有很好的实用性。
1 光电混合图像识别系统
光电混合图像识别系统是基于光电混合联合变换相关器的一种系统,本文提出并设计的光电混合图像识别系统的结构框图如图1所示。
然后,DSP将处理后的目标图像和参考图像构成的联合输入图像实时输出到液晶电视上,联合图像经过激光光束的照射后,经傅里叶变换透镜3后,形成联合图像傅里叶频谱。该频谱经低通滤波后,得到所需的中心频谱[3],并通过摄像头2接收进入ARM9处理器S3C2440,来完成图像频谱的振幅调制及傅里叶逆变换的处理,得到所需互相关结果。由于真目标互相关信号较强,假目标的互相关信号很弱,可以通过设定阈值来判断真假目标图像,即当相关结果大于阈值时,识为真目标,小于阈值时,识为假目标。当判为假目标时,通过通信接口控制DSP继续进行图像采集与处理,实现下一个目标的图像识别,直至判别出真目标。
2 系统设计
该光电图像识别系统主要由目标图像采集与处理模块、光电相关联合变换模块以及自动识别模块组成,采用TMS320c6416DSP与FPGA来完成目标图像的采集与处理,采用ARM9处理器S3C2440来完成对相关功率谱的采集与目标图像识别。
2.1 TMS320C6416
C64x是TI公司推出C6000系列DSP中的最新成员,采用了VelociTI1.2结构,其主要在内部CPU功能单元、通用寄存器组及其数据通路等方面进行了较大的改进。C64x具有8个相互独立的功能单元,其中包含6个支持单周期内单32位、双16位或4个8位数据操作的算术逻辑单元,以及2个支持单周期双16×16位或4个8×8位数据操作的乘法器;内部CPU的通用寄存器组含有32个32位寄存器,支持8位和64位定点数据,并且寄存器A0也可用作条件寄存器;通用寄存器组内部有两条交叉通路,且都可以通过交叉通路访问另一侧的寄存器组;C64x还能够利用非排列的存取指令访问任意字节边界的字或双字。
与C62x相比,C64x平均每条指令在每个时钟周期内的运算能力增加了7.6倍。由于C64x支持双16位和8位数据以及时钟频率的提高,使得其图像处理能力比C62x提高了15倍左右。C64x为程序和地址两级片内存储器结构。一级存储器由程序(L1P)和数据(L1D)缓存组成。其中L1P为512组32B的16KB直接映像式缓存,L1D为128组64B的16KB两路组相联式缓存。C64x具有与C621x、C67lx不同的存储体结构,其存储体位于32位边界,因此对于相同存储体访问时,地址总线的3LSBs相同。另外,C64x具有丰富的外设资源,其中包括:64通道的增强型存储器直接存取(EDMA)控制器;64位/16位数据总线的外部存储器接口EMIFA/EMIFB;33MHz、32位PCI接口和针对异步传输模式的UTOPLA接口;16位或32位主机端接口;3个多通道缓冲串行口等。
内部结构的改进、并行处理能力的提高及丰富的外设资源,使得C64x在图像处理领域具有巨大的开发潜力。为提高系统实时性能,本文采用主频400 MHz的TMS320C6416GLZ作为目标图像处理单元来设计该识别系统。
FPGA ARM DSP 总线 ADC 嵌入式 USB LCD 电子 相关文章:
- 一种基于FPGA的接口电路设计(11-18)
- 利用Virtex-5 FPGA实现更高性能的方法(03-08)
- 设计性能:物理综合与优化(04-28)
- 使用 PlanAhead Design 工具提高设计性能(04-28)
- 采用灵活的汽车FPGA 提高片上系统级集成和降低物料成本(04-28)
- 面向 FPGA 的 ESL 工具(04-29)