通过无传感器FOC控制提高家电电机控制的效率和成本效益
时间:05-26
来源:互联网
点击:
对于大多数家用电器制造商,提高电器效率和降低可闻噪声是最优先考虑的事项。通常,政府通过严格的法规来推动对效率的要求。然后,有一些消费者会愿意引领潮流,以相对较高的价格购买“更绿色”的电器。这驱使电器制造商研究相应的解决方案,解决效率和可闻噪声方面的问题,同时让增加的整体系统成本保持最低。例如,电器制造商希望设计出可以快速响应速度变化(包括洗涤和甩干两个过程)的洗衣机。一些高级电机控制技术,如磁场定向控制(FOC),也称为矢量控制,有助于设计出更加安静节能的洗衣机。
洗衣机控制拓扑
本文主要关注如何部署FOC来设计高效、安静的洗衣机。通过分析洗衣机的构造,可以了解为什么需要高效的电机控制技术。如图1所示,最新型的洗衣机带有一个滚筒单元,该结构由BLDC电机或PMSM电机、电机控制器电路板、带按键用户界面电路板和显示单元组成。控制器电路板和用户界面电路板可以使用串行链路(如UART、SPI或专有串行协议)进行通信,用以设置所需的洗涤负载、漂洗速度,以及处理其他命令。根据所接收到的命令,电机控制器电路板会调整电机速度和扭矩。电机是洗衣机中最主要的用电部件,用电量可达总用电量的85%。因此,对于PMSM控制的任何改进,都可以显著节省用电和成本。为此,高效的电机控制对于设计更好的电器非常关键。
新型信号控制器促进电器设计
半导体技术的发展促进了数字信号控制器(DSC)和功率电子开关的产生,它们可以用于设计变速电机。实际上,得益于DSC高效而高成本效益的电机功率管理,电器不再需要局限于使用一些定制的硬件和控制技术。例如,借助Microchip最新一代的dsPICDSC系列,电器制造商现在可以设计出显著节省用电和成本的电机系统。这是因为dsPICDSC上包含专用于电机控制应用的外设。这些外设包括电机控制脉宽调制(MCPWM)、高速ADC和可扩展闪存程序存储器。
此外,dsPIC DSC的DSP引擎还支持必需的快速数学运算,用于执行需要大量计算的控制循环。本文将讨论如何通过dsPICDSC使用FOC算法来控制洗衣机中的电机。在洗衣机中,dsPICDSC用作电机控制电路板上的信号控制器。用户界面模块可以采用8位单片机(MCU)进行处理,如Microchip的PIC16或PIC18系列MCU,可以针对三相感应电机(ACIM)、三相无刷直流(BLDC)电机或永磁同步电机(PMSM)分别实现FOC算法。由于构造方面的原因,PMSM电机的效率比ACIM电机高。以下将特别讨论无传感器FOC算法对于洗衣机中的PMSM电机是如何工作的。
为什么使用FOC算法?传统的BLDC电机控制方法以六步方式驱动定子,会导致输出转矩出现振荡。在六步控制方式中,先对两个绕组通电,直到转子到达下一个位置,然后电机换向到下一步。霍尔传感器用于确定转子位置,以便对电机进行电子换向。高级无传感器FOC算法使用定子绕组中产生的反电动势来确定转子位置。六步控制(也称为梯形控制)的动态响应本身就不适合用于洗衣机控制,因为一个洗涤周期中的负载会动态变化,并且实际负载还会因洗涤量和所选洗涤周期的不同而变化。此外,在前开式洗衣机中,当负载位于滚筒顶侧时,电机负载要克服重力做功。只有高级算法(如FOC)可以处理这些动态负载变化。
FOC原理
FOC算法会产生矢量形式的3相电压,用于控制三相定子电流。通过使用Park和Clarke变换将物理电流变换为旋转矢量,转矩和磁通分量不会随时间变化(时间不变性)——使得可以与直流电机一样,使用诸如比例积分(PI)控制器之类的传统技术来进行控制。根据设计,在有刷直流电机中,定子磁通和转子磁通之间的角度保持为90°,从而使电机产生可能的最大转矩。通过使用FOC技术,电机电流变换为2轴矢量,就如直流电机中的电流。此过程的第一步是测量三相电机电流。在实际测量中,由于3个电流值的瞬时和为0,所以只需测量其中两个电流,就可以确定第三个电流的值。此外,由于只需要两个电流传感器,因此还可以降低硬件成本。
Clarke变换
第一个变换称为Clarke变换,将以定子作为参照物的3轴二维坐标系转换为2轴坐标系,并保持相同的参照物。如图2所示,其中,Ia、Ib和Ic是各个相电流。
此时,定子电流相量可以在使用α-β轴的2轴正交坐标系上表示。下一步是变换为另一个2轴坐标系,称为d-q轴坐标系,它会随转子磁通而旋转,通过图3所示的Park变换实现。
当正弦输入电流施加到定子上时,会产生旋转磁通。转子的速度与旋转磁通矢量直接相关。磁通矢量必须始终与转子磁极保持对齐,以使电机产生最大的转矩。
图4给出了整个过程的图示,包括坐标变换、PI迭代、逆变换和产生PWM,还描述了FOC控制所需的功能。误差信号根据Id、Iq和各自的参考值而产生。Id参考电流控制转子磁通。请记住,只有在负载稳定的条件下,Id和Iq(代表转矩和磁通)才具有时间不变性。Iq参考电流控制电机的转矩输出。PI控制器的输出提供Vd和Vq,它们构成发送到电机的电压矢量。新的变换角根据由Park逆变换产生的电压和由Park变换产生的电流进行估计。
洗衣机控制拓扑
本文主要关注如何部署FOC来设计高效、安静的洗衣机。通过分析洗衣机的构造,可以了解为什么需要高效的电机控制技术。如图1所示,最新型的洗衣机带有一个滚筒单元,该结构由BLDC电机或PMSM电机、电机控制器电路板、带按键用户界面电路板和显示单元组成。控制器电路板和用户界面电路板可以使用串行链路(如UART、SPI或专有串行协议)进行通信,用以设置所需的洗涤负载、漂洗速度,以及处理其他命令。根据所接收到的命令,电机控制器电路板会调整电机速度和扭矩。电机是洗衣机中最主要的用电部件,用电量可达总用电量的85%。因此,对于PMSM控制的任何改进,都可以显著节省用电和成本。为此,高效的电机控制对于设计更好的电器非常关键。
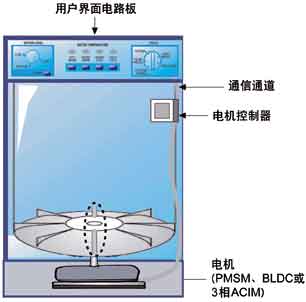
图1新型洗衣机的构造
新型信号控制器促进电器设计
半导体技术的发展促进了数字信号控制器(DSC)和功率电子开关的产生,它们可以用于设计变速电机。实际上,得益于DSC高效而高成本效益的电机功率管理,电器不再需要局限于使用一些定制的硬件和控制技术。例如,借助Microchip最新一代的dsPICDSC系列,电器制造商现在可以设计出显著节省用电和成本的电机系统。这是因为dsPICDSC上包含专用于电机控制应用的外设。这些外设包括电机控制脉宽调制(MCPWM)、高速ADC和可扩展闪存程序存储器。
此外,dsPIC DSC的DSP引擎还支持必需的快速数学运算,用于执行需要大量计算的控制循环。本文将讨论如何通过dsPICDSC使用FOC算法来控制洗衣机中的电机。在洗衣机中,dsPICDSC用作电机控制电路板上的信号控制器。用户界面模块可以采用8位单片机(MCU)进行处理,如Microchip的PIC16或PIC18系列MCU,可以针对三相感应电机(ACIM)、三相无刷直流(BLDC)电机或永磁同步电机(PMSM)分别实现FOC算法。由于构造方面的原因,PMSM电机的效率比ACIM电机高。以下将特别讨论无传感器FOC算法对于洗衣机中的PMSM电机是如何工作的。
为什么使用FOC算法?传统的BLDC电机控制方法以六步方式驱动定子,会导致输出转矩出现振荡。在六步控制方式中,先对两个绕组通电,直到转子到达下一个位置,然后电机换向到下一步。霍尔传感器用于确定转子位置,以便对电机进行电子换向。高级无传感器FOC算法使用定子绕组中产生的反电动势来确定转子位置。六步控制(也称为梯形控制)的动态响应本身就不适合用于洗衣机控制,因为一个洗涤周期中的负载会动态变化,并且实际负载还会因洗涤量和所选洗涤周期的不同而变化。此外,在前开式洗衣机中,当负载位于滚筒顶侧时,电机负载要克服重力做功。只有高级算法(如FOC)可以处理这些动态负载变化。
FOC原理
FOC算法会产生矢量形式的3相电压,用于控制三相定子电流。通过使用Park和Clarke变换将物理电流变换为旋转矢量,转矩和磁通分量不会随时间变化(时间不变性)——使得可以与直流电机一样,使用诸如比例积分(PI)控制器之类的传统技术来进行控制。根据设计,在有刷直流电机中,定子磁通和转子磁通之间的角度保持为90°,从而使电机产生可能的最大转矩。通过使用FOC技术,电机电流变换为2轴矢量,就如直流电机中的电流。此过程的第一步是测量三相电机电流。在实际测量中,由于3个电流值的瞬时和为0,所以只需测量其中两个电流,就可以确定第三个电流的值。此外,由于只需要两个电流传感器,因此还可以降低硬件成本。
Clarke变换
第一个变换称为Clarke变换,将以定子作为参照物的3轴二维坐标系转换为2轴坐标系,并保持相同的参照物。如图2所示,其中,Ia、Ib和Ic是各个相电流。
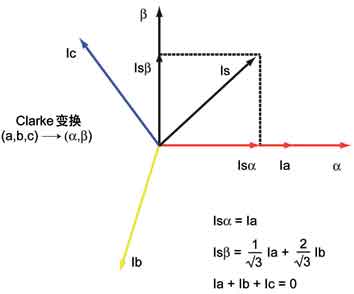
图2 Clarke变换
此时,定子电流相量可以在使用α-β轴的2轴正交坐标系上表示。下一步是变换为另一个2轴坐标系,称为d-q轴坐标系,它会随转子磁通而旋转,通过图3所示的Park变换实现。
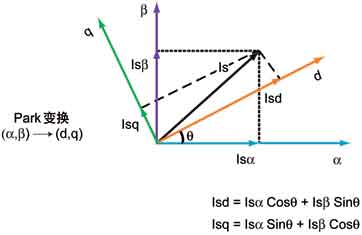
图3 Park变换
当正弦输入电流施加到定子上时,会产生旋转磁通。转子的速度与旋转磁通矢量直接相关。磁通矢量必须始终与转子磁极保持对齐,以使电机产生最大的转矩。
图4给出了整个过程的图示,包括坐标变换、PI迭代、逆变换和产生PWM,还描述了FOC控制所需的功能。误差信号根据Id、Iq和各自的参考值而产生。Id参考电流控制转子磁通。请记住,只有在负载稳定的条件下,Id和Iq(代表转矩和磁通)才具有时间不变性。Iq参考电流控制电机的转矩输出。PI控制器的输出提供Vd和Vq,它们构成发送到电机的电压矢量。新的变换角根据由Park逆变换产生的电压和由Park变换产生的电流进行估计。
电路 半导体 电子 Microchip PIC PWM ADC DSP 单片机 MCU 传感器 霍尔传感器 电压 电流 电阻 电感 二极管 电容 逆变器 LCD LED 相关文章:
- TFT-LCD驱动电路的设计(08-27)
- 基于S3C2410的TFT-LCD驱动电路的设计(上)(09-03)
- 基于S3C2410的TFT-LCD驱动电路的设计(下)(09-03)
- 大势所趋的数字电源设计方式(11-04)
- 几种主流MOSFET驱动电路的分析(10-27)
- 前沿方案延缓LED老化(11-27)