基于PMAC控制卡的激光扫描尺寸测量系统
时间:01-24
来源:互联网
点击:
1 引言
在机械加工中经常需要对一些简单的几何尺寸,如直径、边距等进行测量。这类工作重复性大,工作量大,传统的手工测量不仅增加了现场工作人员的工作强度,精度低,且手工测量的数据在统计处理时也很不方便。这类工作如果使用坐标测量仪等精度高,通用性强的仪器测量,在经济和效率上都很难满足要求。另有一种专门的激光扫描传感器可用于此类测量,但其测量精度是建立在对独立运动系统速度的精确控制上的,这无疑增加了成本。为了方便实现对这类简单、一维尺寸、高效、高精度,且易于数据管理的测量,在此提出一种可在PMAC控制卡控制的普通运动平台上实施激光扫描测量的系统。它融合了以上两种测量方法,即通过对激光信号的检测获得被测物的边缘信号,并根据此信号锁存光栅尺读数,以得到被测物的边缘位置,从而进一步得到尺寸值。
这种方法具有光电测量高速、非接触的优点,又可充分利用技术成熟、应用广泛的光栅尺资源。由于光栅尺的精度通常都较高,此测量系统可在一定范围内获得较高的精度。
2 测量原理及整体构造
测量系统由工控机、PMAC控制卡、运动测控系统(包括光栅尺、伺服电机、丝杠等)、激光发射装置和光电检测装置组成。系统的主要原理如图1所示,被测物装在实验台上,并随实验台一起运动,运动的控制由PMAC控制卡完成,它读人光栅尺的读数,并输出给电机的控制量。被测物两侧分别是激光发射装置和光电检测元件,当被测物位于光路中时,检测元件处于断开状态;当被测物离开时,元件导通。随着被测物的移动,当其边沿通过激光束时,检测元件会产生由通到断或由断到通的跳变。通过一定的设置,PMAC可检测到这些跳变信号,并锁存当时的光栅尺读数,这样就得到被测物的边沿位置,而通过测量前后两个边沿位置,就可得到所需的尺寸值。
激光器采用了小功率半导体激光器,波长为640nm。其小巧的体积和较低的价格使其非常适用于这类应用场合。光电检测元件采用普通的金属封装光电三极管。
PMAC插在工控机的PCI插槽内,并通过PCI总线进行通信。通信的主要内容有两方面:向PMAC发运动控制指令,从而使其完成平台的运动控制;从PMAC内读取其锁存的被测物边沿位置读数,从而完成结果的输出、保存及分析工作。为方便对采集数据的处理分析,以及便于研究系统性能,该系统采用了工控机加PMAC的组织方案,在系统定型后可以使用更加经济的方案,如ARM-Linux加PMAC。
PMAC控制卡的使用是很灵活的,要构成上面所述的系统需要对其进行一些设置。下面将详细介绍在这种应用中PMAC卡的设置方法及上下位机通信的实现办法。
3 2PMAC卡的设置
3.1 PMAC卡简介
PMAC运动控制卡是Delta-Tau公司推出的,它是可通过多种方式与微机接口的系列控制卡。该例使用的是PCI接口控制卡:PMAC-PC。
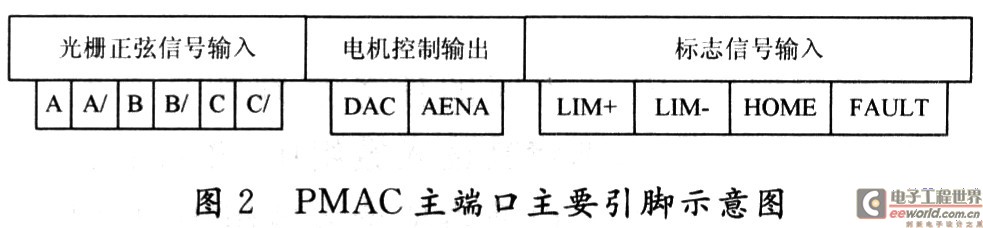
PMAC本质上是一个基于DSP芯片的多功能板上系统。该例的PMAC有2个主接口,每个主接口可以同时控制4台电机的运动。对于每一台电机,主接口都有一组相应的引脚(如图2所示)。分别负责光栅尺信号输入,电机控制输出和标志信号输入。在该例中主接口通过跳线设置为光电隔离模式。
除主接口外,PMAC还有一系列通用的模拟、数字输入/输出口。这些端口与其DSP内存统一编址,可通过统一的方式存取。PMAC地址空间的功能是预设固定的,如某一部分地址保存的数据代表某台电机的设置,另一部分则是用户应用所保存的数据。为方便上位机对PMAC内存的操作和应用程序的编写,其内存被按其功能划分为各种变量,如I变量、M变量、P变量。I变量的值设置了PMAC卡的工作环境,这又使I变量可被划分为许多种类型,如电机设置I变量、通信设置I变量、编码器I变量、P变量(供用户程序使用的全局变量、M变量(指针变量),即其本身所代表的内存地址存储的是另一个存储单元的地址)。M变量可根据需要指向任意存储位置,包括内存和端口寄存器。不过在PMAC上电时,部分M变量会被预先初始化为指向特殊位置的值,如M203的缺省值指向2号编码器的位置捕获寄存器。
3.2 位置捕获功能的设置
位置捕获功能是指在一个外部事件进入某一寄存器时,锁存相应的当前编码器位置。这是一个完全由与编码器相关的硬件电路来完成的任务,所以它惟一的延迟就是硬件门的延迟,这使它具有非常高的位置捕捉精度。
电路的工作方式可通过软件选择,如可设置读入外部事件的位置。设置是通过相关编码器I变量完成的。每一个编码器都可通过5个I变量来设置,位置捕获功能相关的变量为编码器I变量2和编码器I变量3。变量3设置事件捕捉的位置,如可将其设为通过HOME标志捕捉。变量2设置外部事件的捕捉方式,如是上跳沿还是下跳沿。PMAC共可设置16个编码器,每个编码器的I变量是按顺序5个一组编排的,依次为I900~I979。对于编码器2(编号从1开始),若将其设置为捕捉HOME标志的上跳沿信号进行位置捕捉,则可通过向PMAC发送命令“I907=2”和“I908=0”来实现。每一个编码器都对应于一组寄存器,通过这些寄存器可设置编码器的工作方式,如前面对编码器I变量的设置,实际就是向这些寄存器的某些位写入某些值。通过这些寄存器也可读取编码器信息,如当编码器完成一次位置捕捉后,被锁存的位置就保存在这些寄存器中,对于编码器2,该寄存器的位置为X:MYMC007的所有24位。编码器还根据位置捕捉的情况自动设置某些标志位,即当完成一次捕捉时将标志置1。此时,无论外部信号有什么变化都不会再进行捕捉,当捕捉结果被取走时(即对相应寄存器有读操作),编码器自动将标志置0,并重新开始响应外部事件进行新的位置捕捉。对于编码器2,该标志位的位置为X:MYMC004的第17位(从0开始,共24位)。
在机械加工中经常需要对一些简单的几何尺寸,如直径、边距等进行测量。这类工作重复性大,工作量大,传统的手工测量不仅增加了现场工作人员的工作强度,精度低,且手工测量的数据在统计处理时也很不方便。这类工作如果使用坐标测量仪等精度高,通用性强的仪器测量,在经济和效率上都很难满足要求。另有一种专门的激光扫描传感器可用于此类测量,但其测量精度是建立在对独立运动系统速度的精确控制上的,这无疑增加了成本。为了方便实现对这类简单、一维尺寸、高效、高精度,且易于数据管理的测量,在此提出一种可在PMAC控制卡控制的普通运动平台上实施激光扫描测量的系统。它融合了以上两种测量方法,即通过对激光信号的检测获得被测物的边缘信号,并根据此信号锁存光栅尺读数,以得到被测物的边缘位置,从而进一步得到尺寸值。
这种方法具有光电测量高速、非接触的优点,又可充分利用技术成熟、应用广泛的光栅尺资源。由于光栅尺的精度通常都较高,此测量系统可在一定范围内获得较高的精度。
2 测量原理及整体构造
测量系统由工控机、PMAC控制卡、运动测控系统(包括光栅尺、伺服电机、丝杠等)、激光发射装置和光电检测装置组成。系统的主要原理如图1所示,被测物装在实验台上,并随实验台一起运动,运动的控制由PMAC控制卡完成,它读人光栅尺的读数,并输出给电机的控制量。被测物两侧分别是激光发射装置和光电检测元件,当被测物位于光路中时,检测元件处于断开状态;当被测物离开时,元件导通。随着被测物的移动,当其边沿通过激光束时,检测元件会产生由通到断或由断到通的跳变。通过一定的设置,PMAC可检测到这些跳变信号,并锁存当时的光栅尺读数,这样就得到被测物的边沿位置,而通过测量前后两个边沿位置,就可得到所需的尺寸值。

激光器采用了小功率半导体激光器,波长为640nm。其小巧的体积和较低的价格使其非常适用于这类应用场合。光电检测元件采用普通的金属封装光电三极管。
PMAC插在工控机的PCI插槽内,并通过PCI总线进行通信。通信的主要内容有两方面:向PMAC发运动控制指令,从而使其完成平台的运动控制;从PMAC内读取其锁存的被测物边沿位置读数,从而完成结果的输出、保存及分析工作。为方便对采集数据的处理分析,以及便于研究系统性能,该系统采用了工控机加PMAC的组织方案,在系统定型后可以使用更加经济的方案,如ARM-Linux加PMAC。
PMAC控制卡的使用是很灵活的,要构成上面所述的系统需要对其进行一些设置。下面将详细介绍在这种应用中PMAC卡的设置方法及上下位机通信的实现办法。
3 2PMAC卡的设置
3.1 PMAC卡简介
PMAC运动控制卡是Delta-Tau公司推出的,它是可通过多种方式与微机接口的系列控制卡。该例使用的是PCI接口控制卡:PMAC-PC。
PMAC本质上是一个基于DSP芯片的多功能板上系统。该例的PMAC有2个主接口,每个主接口可以同时控制4台电机的运动。对于每一台电机,主接口都有一组相应的引脚(如图2所示)。分别负责光栅尺信号输入,电机控制输出和标志信号输入。在该例中主接口通过跳线设置为光电隔离模式。
除主接口外,PMAC还有一系列通用的模拟、数字输入/输出口。这些端口与其DSP内存统一编址,可通过统一的方式存取。PMAC地址空间的功能是预设固定的,如某一部分地址保存的数据代表某台电机的设置,另一部分则是用户应用所保存的数据。为方便上位机对PMAC内存的操作和应用程序的编写,其内存被按其功能划分为各种变量,如I变量、M变量、P变量。I变量的值设置了PMAC卡的工作环境,这又使I变量可被划分为许多种类型,如电机设置I变量、通信设置I变量、编码器I变量、P变量(供用户程序使用的全局变量、M变量(指针变量),即其本身所代表的内存地址存储的是另一个存储单元的地址)。M变量可根据需要指向任意存储位置,包括内存和端口寄存器。不过在PMAC上电时,部分M变量会被预先初始化为指向特殊位置的值,如M203的缺省值指向2号编码器的位置捕获寄存器。
3.2 位置捕获功能的设置
位置捕获功能是指在一个外部事件进入某一寄存器时,锁存相应的当前编码器位置。这是一个完全由与编码器相关的硬件电路来完成的任务,所以它惟一的延迟就是硬件门的延迟,这使它具有非常高的位置捕捉精度。
电路的工作方式可通过软件选择,如可设置读入外部事件的位置。设置是通过相关编码器I变量完成的。每一个编码器都可通过5个I变量来设置,位置捕获功能相关的变量为编码器I变量2和编码器I变量3。变量3设置事件捕捉的位置,如可将其设为通过HOME标志捕捉。变量2设置外部事件的捕捉方式,如是上跳沿还是下跳沿。PMAC共可设置16个编码器,每个编码器的I变量是按顺序5个一组编排的,依次为I900~I979。对于编码器2(编号从1开始),若将其设置为捕捉HOME标志的上跳沿信号进行位置捕捉,则可通过向PMAC发送命令“I907=2”和“I908=0”来实现。每一个编码器都对应于一组寄存器,通过这些寄存器可设置编码器的工作方式,如前面对编码器I变量的设置,实际就是向这些寄存器的某些位写入某些值。通过这些寄存器也可读取编码器信息,如当编码器完成一次位置捕捉后,被锁存的位置就保存在这些寄存器中,对于编码器2,该寄存器的位置为X:MYMC007的所有24位。编码器还根据位置捕捉的情况自动设置某些标志位,即当完成一次捕捉时将标志置1。此时,无论外部信号有什么变化都不会再进行捕捉,当捕捉结果被取走时(即对相应寄存器有读操作),编码器自动将标志置0,并重新开始响应外部事件进行新的位置捕捉。对于编码器2,该标志位的位置为X:MYMC004的第17位(从0开始,共24位)。
传感器 半导体 三极管 总线 ARM Linux DSP 编码器 电路 PLC 相关文章:
- 传感器技术中的阻抗测量方法(03-23)
- 电桥测量基础(06-10)
- 适用于微型仪器的精密电容传感器接口(09-06)
- 基于PIR的移动检测系统的实现(11-03)
- 基于霍尔传感器的直流电机转速测量系统设计(11-14)
- NPXI智能传感器的TPMS系统设计(11-29)