如何改善 ERM 及 LRA 执行器的起动与停止性能
时间:04-17
来源:互联网
点击:
作者:德州仪器公司Brian Burk
偏心转子马达 (ERM) 与线性谐振执行器 (LRA) 常用于智能手机与平板电脑应用,通过触觉效应提供触感反馈。虽然在进行触感设计时需要考虑许多特性,但用户感觉最明显的特征之一却是执行器的起动与停止时间。
执行器的起动时间是从 0%(或启动)到 90% 最大加速所需的时间。同样,停止时间则是指执行器从驱动器波形终止(或驱动器关闭)到 10% 最大加速所需的时间。
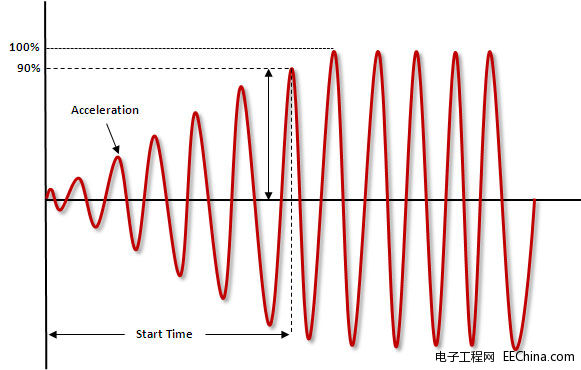
图 1:起动时间
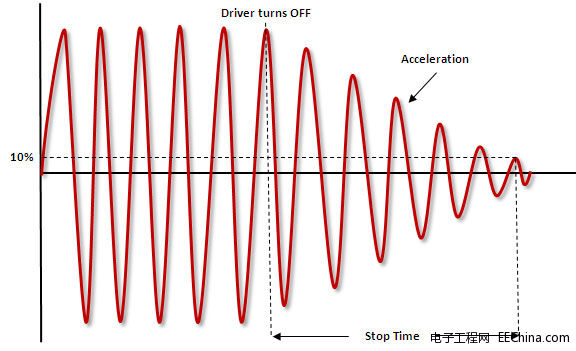
图 2:停止时间
这种起动与停止时间会形成用户所谓的“灵敏”或“清晰锐利”的质感。
起动时间与汽车的“0-60”起动时间相似。让我们来看两款汽车,一款是高速运动车,另一款则是价格实惠的紧凑型汽车。两辆汽车都在红灯前停车。在绿灯亮时,两辆车都把油门踩到最大,开始行驶。运动车具有极强的速度爆发力,很快将紧凑型汽车甩在后面。与此同时,紧凑型汽车车身才刚刚跨过起跑线一半,还远远没有加速到全速。

图 3:过驱动及制动与 0-60 加速时间类似
同样,某些执行器有极快的起动时间,而另一些则起动时间极慢。它取决于执行器的设计、制造和类型,所有这些都可以在实验室中进行实验特性化。对于触摸屏智能手机的触觉,用户可能会察觉到一部电话的键盘点击比另一部更灵敏。这是由执行器响应时间决定的。
要改善执行器性能,执行器驱动器可对其进行过驱动,实现更快的起动时间,同时还可反向驱动,实现更快的停止时间。对于 ERM,实现过驱动可在开始时应用更高的 DC 电压,应用负电压可实现制动。
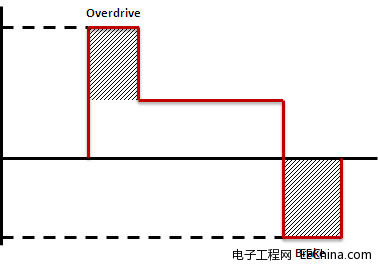
图 4:ERM 过驱动及制动驱动波形
对于 LRA,过驱动是在开始时应用更高的 AC 电压,而实现制动则应用 180 度异相位信号。
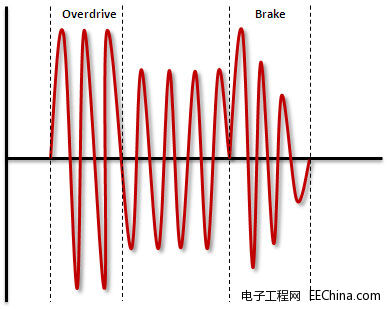
图 5:LRA 过驱动及制动驱动波形
德州仪器 (TI) 最新 DRV2605 触觉驱动器具有称之为“智能环路”的特性,其可使用闭环反馈应用,精确过驱动及制动信号,最大限度缩短执行器的起动与停止时间。智能环路是通过主动监测执行器的电动势(反电动势)信号,准确控制驱动器电压与加速实现这一点的。
最终结果是为 ERM 与 LRA 实现可简化软件编程、缩短起动与制动时间 50% 的自动过驱动与制动。DRV2605 的自动执行器诊断与电平跟踪特性可在各种环境条件下实现一致的加速。如果您想获得比同类竞争产品快 0-60 加速,请将 DRV2605 用作测试驱动器。您会每次胜出!
偏心转子马达 (ERM) 与线性谐振执行器 (LRA) 常用于智能手机与平板电脑应用,通过触觉效应提供触感反馈。虽然在进行触感设计时需要考虑许多特性,但用户感觉最明显的特征之一却是执行器的起动与停止时间。
执行器的起动时间是从 0%(或启动)到 90% 最大加速所需的时间。同样,停止时间则是指执行器从驱动器波形终止(或驱动器关闭)到 10% 最大加速所需的时间。
图 1:起动时间
图 2:停止时间
这种起动与停止时间会形成用户所谓的“灵敏”或“清晰锐利”的质感。
起动时间与汽车的“0-60”起动时间相似。让我们来看两款汽车,一款是高速运动车,另一款则是价格实惠的紧凑型汽车。两辆汽车都在红灯前停车。在绿灯亮时,两辆车都把油门踩到最大,开始行驶。运动车具有极强的速度爆发力,很快将紧凑型汽车甩在后面。与此同时,紧凑型汽车车身才刚刚跨过起跑线一半,还远远没有加速到全速。
图 3:过驱动及制动与 0-60 加速时间类似
同样,某些执行器有极快的起动时间,而另一些则起动时间极慢。它取决于执行器的设计、制造和类型,所有这些都可以在实验室中进行实验特性化。对于触摸屏智能手机的触觉,用户可能会察觉到一部电话的键盘点击比另一部更灵敏。这是由执行器响应时间决定的。
要改善执行器性能,执行器驱动器可对其进行过驱动,实现更快的起动时间,同时还可反向驱动,实现更快的停止时间。对于 ERM,实现过驱动可在开始时应用更高的 DC 电压,应用负电压可实现制动。
图 4:ERM 过驱动及制动驱动波形
对于 LRA,过驱动是在开始时应用更高的 AC 电压,而实现制动则应用 180 度异相位信号。
图 5:LRA 过驱动及制动驱动波形
德州仪器 (TI) 最新 DRV2605 触觉驱动器具有称之为“智能环路”的特性,其可使用闭环反馈应用,精确过驱动及制动信号,最大限度缩短执行器的起动与停止时间。智能环路是通过主动监测执行器的电动势(反电动势)信号,准确控制驱动器电压与加速实现这一点的。
最终结果是为 ERM 与 LRA 实现可简化软件编程、缩短起动与制动时间 50% 的自动过驱动与制动。DRV2605 的自动执行器诊断与电平跟踪特性可在各种环境条件下实现一致的加速。如果您想获得比同类竞争产品快 0-60 加速,请将 DRV2605 用作测试驱动器。您会每次胜出!
- 8位高速A/D转换器TLC5510的应用(02-16)
- 改善平板显示器的音频性能(02-13)
- 运算放大器的选择(03-18)
- 单端数字音频放大器设计和应用考虑的要素(05-19)
- 为网络监控摄像机设计合适的电源(05-20)
- 改善可编程增益放大器性能的一个技巧(05-21)