帧同步电路的设计
时间:10-26
来源:互联网
点击:
1 引言
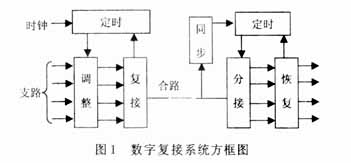
数字通信网中,常常把若干路低速数字信号合并成一个高速数字信号,通过高速信道传输以扩大传输容量,提高传输效率。数字复接就是实现这种数字信号合并的专门技术,系统框图如图1所示。为使得分接器的帧状态相对于复接器的帧状态能获得并保持相位关系,且能正确地实施分接,在合路数字信号中必须循环插入帧定位信号,因此在合路数字信号中,也就存在以帧为单位的结构,各个数字时隙的位置可以根据帧定位信号加以识别。因此帧同步是同步复接设备中的重要部分。
2 同步方案的选择
帧同步通常采用的方法有逐位调整法和置位调整法。
2.1 逐位调整法
逐位调整法的基本原理是调整收端本地帧同步码的相位,使之与收到的总信码中的帧同步码对准。收端本地帧同步码产生后,送入同步码检测电路,总信码也送入同步码检测电路。如本地帧同步码的相位没有对准总信码中的帧同步码位,检测电路就输出一个一定宽度的扣除脉冲,利用该扣除脉冲将再生主时钟脉冲扣掉一个,使收端的时间相对于总信码后移了一位码元时间。再生信码仍按主时钟节拍不停的送来,而本地定时系统仍保留在原来位置不动,停止的时间为一个主时钟周期。这样,同步码检测电路相当于检测下一位信码。如果下一位的检测结果仍不一致,则再扣除一位主时钟。按这样搜索下去,直至检测到与同步码相同的信码相位为止。
2.2 置位调整法
在失帧期间,接收设备时序发生器被置于一个特定的等待状态,即接收设备帧状态处于特定的预置状态;接收码流逐比特进入帧定位信号检测电路,一旦其中全部n位信码与规定的帧定位信号码相同,就输出一个控制信号,启动接收设备的时序发生器,同时用接收时钟信号来推动他。然后经过一个检测周期的时间检验判断。如果未建立正确的相位关系,就重复上述过程;如果确定建立了正确的相位关系,就保持这种相位关系并结束搜捕过程。如果接收码流中未同步前的任何一段信码都不出现帧定位码型,而且帧定位码中不发生误码,那么只要遇到一个完整的帧定位码组就足以建立起同步,可见这时完成搜捕过程比较快。由于噪声的影响,可能存在虚警现象和漏检现象,使搜捕时间延长。
2.3 两种方法的比较
在非同步位置上,移位调整法每调整一次都要检验一次;而置位调整法只有出现虚警现象时才检验一次。可见,后者比较节省时间。
在同步位置上,逐位调整法不管帧定位码中是否出现误码总要检验一次,而且即使有某种程度的误码也可能做出相位关系的正确判断;而置位调整法,只要帧定位码中有误码,就一定错过了建立同步的机会。可见后者会把搜捕时间拖长。
综合上述两方面,当合路信号误码率较高时,逐位调整法的平均搜捕时间较短;当合路信号误码率较低时,置位调整法的平均搜捕时间较短。数字信道误码率按国际推荐常常是相当低的,不可用误码率门限也只有1×10-3,一般采用置位调整法比较合适。
3 帧同步系统的设计
本设计采用置位调整法。帧同步单元大致可以分为4块:帧定位码检测单元、同步保护及校核单元、调整单元和帧时标发生单元。
其原理框图如图2所示。
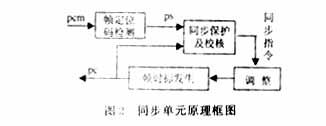
当合路信号pcm串行输入帧定位码检测单元,当检测到同步时标时,输出一个同步时标ps脉冲,他与时标发生器产生的帧时标脉冲pc同时输入同步保护及校核单元。在同步保护及校核单元,通过比较ps和pc同步与否,以及连续同步或不同步的次数,来判断系统是否同步。如果不同步,该单元将产生一个指令,使系统处于待调整状态。最后通过调整单元控制时标发生器,调节帧时标pc出现的相位。然后反复pc和ps比较过程,使系统同步。
3.1 帧定位码检测单元
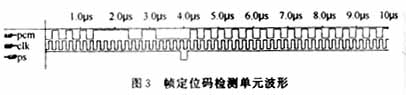
设系统的帧定位码长n=12,帧定位码为“111100110000”。帧定位码检测单元将合路信号串行输入12个串联的移位寄存器,当检测到移位寄存器的12个输出正好与帧定位码相同时,马上产生一个同步时标ps负脉冲,其脉冲宽度为一个系统时钟周期。波形如图3所示。
3.2 同步保护及校核单元
在失步状态,帧同步检测电路一旦发现同步码,校核计数器就开始计数。如果随后在规定时刻上又连续发现(α1)次,即校核计数到α,就确定进入同步态。此处的α称为后方保护计数。在同步状态时,由于干扰或中断,可能使帧同步码组丢失,这时要判断是否真失步,以免错误的进入捕捉过程。帧同步检测电路在规定的时刻一旦有一次未发现同步码,保护计数器就计1。如果随后在规定的时刻上又连续(β-1)次未发现,即保护计数到β,就进入失步状态。此处的β称为前方保护计数。本设计中,β=4;α=3。波形见图4。
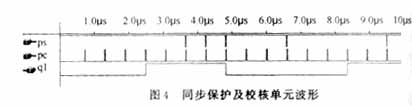
设计中,通过比较同步时标ps和帧时标pc在时间上是否对准来判断系统状态。ps为同步时标,pc为帧时标发生器产生的帧时标,q1指示了系统的状态,q1=0表示系统处于同步状态,q1=1表示系统处于捕捉状态。如图4,当pc从低电平跳变到高电平时,如果ps=0则表示他们同步;如果ps=1则表示他们不同步。如果ps与pc连续4次不同步时,系统就将判为失步状态;若连续3次同步时,系统就将恢复为同步状态。
数字通信网中,常常把若干路低速数字信号合并成一个高速数字信号,通过高速信道传输以扩大传输容量,提高传输效率。数字复接就是实现这种数字信号合并的专门技术,系统框图如图1所示。为使得分接器的帧状态相对于复接器的帧状态能获得并保持相位关系,且能正确地实施分接,在合路数字信号中必须循环插入帧定位信号,因此在合路数字信号中,也就存在以帧为单位的结构,各个数字时隙的位置可以根据帧定位信号加以识别。因此帧同步是同步复接设备中的重要部分。
2 同步方案的选择
帧同步通常采用的方法有逐位调整法和置位调整法。
2.1 逐位调整法
逐位调整法的基本原理是调整收端本地帧同步码的相位,使之与收到的总信码中的帧同步码对准。收端本地帧同步码产生后,送入同步码检测电路,总信码也送入同步码检测电路。如本地帧同步码的相位没有对准总信码中的帧同步码位,检测电路就输出一个一定宽度的扣除脉冲,利用该扣除脉冲将再生主时钟脉冲扣掉一个,使收端的时间相对于总信码后移了一位码元时间。再生信码仍按主时钟节拍不停的送来,而本地定时系统仍保留在原来位置不动,停止的时间为一个主时钟周期。这样,同步码检测电路相当于检测下一位信码。如果下一位的检测结果仍不一致,则再扣除一位主时钟。按这样搜索下去,直至检测到与同步码相同的信码相位为止。
2.2 置位调整法
在失帧期间,接收设备时序发生器被置于一个特定的等待状态,即接收设备帧状态处于特定的预置状态;接收码流逐比特进入帧定位信号检测电路,一旦其中全部n位信码与规定的帧定位信号码相同,就输出一个控制信号,启动接收设备的时序发生器,同时用接收时钟信号来推动他。然后经过一个检测周期的时间检验判断。如果未建立正确的相位关系,就重复上述过程;如果确定建立了正确的相位关系,就保持这种相位关系并结束搜捕过程。如果接收码流中未同步前的任何一段信码都不出现帧定位码型,而且帧定位码中不发生误码,那么只要遇到一个完整的帧定位码组就足以建立起同步,可见这时完成搜捕过程比较快。由于噪声的影响,可能存在虚警现象和漏检现象,使搜捕时间延长。
2.3 两种方法的比较
在非同步位置上,移位调整法每调整一次都要检验一次;而置位调整法只有出现虚警现象时才检验一次。可见,后者比较节省时间。
在同步位置上,逐位调整法不管帧定位码中是否出现误码总要检验一次,而且即使有某种程度的误码也可能做出相位关系的正确判断;而置位调整法,只要帧定位码中有误码,就一定错过了建立同步的机会。可见后者会把搜捕时间拖长。
综合上述两方面,当合路信号误码率较高时,逐位调整法的平均搜捕时间较短;当合路信号误码率较低时,置位调整法的平均搜捕时间较短。数字信道误码率按国际推荐常常是相当低的,不可用误码率门限也只有1×10-3,一般采用置位调整法比较合适。
3 帧同步系统的设计
本设计采用置位调整法。帧同步单元大致可以分为4块:帧定位码检测单元、同步保护及校核单元、调整单元和帧时标发生单元。
其原理框图如图2所示。
当合路信号pcm串行输入帧定位码检测单元,当检测到同步时标时,输出一个同步时标ps脉冲,他与时标发生器产生的帧时标脉冲pc同时输入同步保护及校核单元。在同步保护及校核单元,通过比较ps和pc同步与否,以及连续同步或不同步的次数,来判断系统是否同步。如果不同步,该单元将产生一个指令,使系统处于待调整状态。最后通过调整单元控制时标发生器,调节帧时标pc出现的相位。然后反复pc和ps比较过程,使系统同步。
3.1 帧定位码检测单元
设系统的帧定位码长n=12,帧定位码为“111100110000”。帧定位码检测单元将合路信号串行输入12个串联的移位寄存器,当检测到移位寄存器的12个输出正好与帧定位码相同时,马上产生一个同步时标ps负脉冲,其脉冲宽度为一个系统时钟周期。波形如图3所示。
3.2 同步保护及校核单元
在失步状态,帧同步检测电路一旦发现同步码,校核计数器就开始计数。如果随后在规定时刻上又连续发现(α1)次,即校核计数到α,就确定进入同步态。此处的α称为后方保护计数。在同步状态时,由于干扰或中断,可能使帧同步码组丢失,这时要判断是否真失步,以免错误的进入捕捉过程。帧同步检测电路在规定的时刻一旦有一次未发现同步码,保护计数器就计1。如果随后在规定的时刻上又连续(β-1)次未发现,即保护计数到β,就进入失步状态。此处的β称为前方保护计数。本设计中,β=4;α=3。波形见图4。
设计中,通过比较同步时标ps和帧时标pc在时间上是否对准来判断系统状态。ps为同步时标,pc为帧时标发生器产生的帧时标,q1指示了系统的状态,q1=0表示系统处于同步状态,q1=1表示系统处于捕捉状态。如图4,当pc从低电平跳变到高电平时,如果ps=0则表示他们同步;如果ps=1则表示他们不同步。如果ps与pc连续4次不同步时,系统就将判为失步状态;若连续3次同步时,系统就将恢复为同步状态。
- 整流电路(11-30)
- 单运放构成的单稳延时电路(11-29)
- 直流稳压电源电路(11-30)
- 基于ISP1581型接口电路的USB2.0接口设计(01-18)
- 单电源供电的IGBT驱动电路在铁路辅助电源系统中的应用(01-16)
- 为太阳能灯供电的低损耗电路的设计(01-22)