波特率自适应的RS-485中继器设计
时间:09-20
来源:互联网
点击:
4 波特率自适应RS-485中继器
在工业现场应用中,RS-485总线的通信速度一般为2 400~115 200 bps,以前设计的RS-485中继器控制RS-485收发器收发状态,以一数据帧时间宽度为单元。不同的波特率,控制RS-485收发器收发状态的时间宽度也不同,所以RS-485总线的通信速度不同,需设置控制RS-485收发器收发状态的时间宽度,以适应所应用RS-485总线的通信速度。
波特率自适应RS-485中继器的设计思路是:控制RS-485收发器收发状态,以一数据位时间宽度为单元。若控制RS-485收发器收发状态时间宽度适应任意波特率的一数据位时间宽度,则RS-485中继器适应任意RS-485总线的通信速度。为此设计波特率自适应RS-485中继器,如图4所示。
U3、U4为由CA555组成的相对延时单稳触发电路,分别控制RS-485中继器数据左、右传状态。相对延时单稳触发电路是在由CA555组成的普通单稳触发电路的基础上增加了二极管D1和D2。当CA555输入引脚TRIG为低电平时,CA555内部和二极管D1、D2将RC延时电路放电,输出Q端输出高电平;当CA555输入引脚TRIG变为高电平时,CA555内部和二极管D1、D2开始使RC延时电路充电,延时一段时间(与R×C有关),输出Q端输出低电平。其输入、输出信号时序如图5所示。
图5中,TRIG为CA555的输入信号;Q为CA555的输出信号;Tw为单个或连续低电平数据位的时间宽度;Trc为U3、U4组成的单稳触发电路中R11×C1(或R12×C2)决定的延时时间宽度,选择小于RS-485总线最高波特率(如115 200 bps)的 数据位的时间宽度为宜。在本设计中,控制RS-485收发器收发状态的时间宽度始终比总线中传输数据低电平宽度大Trc,而且Trc不会大于任何波特率的一个数据位的时间宽度。所以本文设计的波特率自适应RS-485中继器适应于工业现场应用RS-485总线的任意通信速度。
由于波特率自适应RS-485中继器以一数据位时间宽度为单元,所以只有传输低电平数据位时,输出端RS-485收发器的输出使能才打开,并输出低电平。当传输高电平数据位时,输出端RS-485收发器的输出使能关闭,RS-485收发器的输出为高阻状态。所以,在每端RS-485收发器的输出端需增加上拉电阻、下拉电阻和匹配电阻构成的偏置电路,当输出为高阻状态时,在匹配电阻上形成表示高电平的差分信号并输出。
为提高波特率自适应RS-485中继器的可靠性,可将U3的输出端经一反相器与U4的低电平有效的复位端R连接;将U4的输出端经一反相器与U3的低电平有效的复位端R连接。这样,当从RS-485中继器的一侧向另一侧传输数据时,消除了同时向相反方向传输数据的可能性。
当总线上干扰较大时也有可能发生总线冲突,数据右传状态和数据左传状态同时发生。由于实际电路的不完全对称,波特率自适应RS-485中继器只能向一个方向传输数据,并且当总线冲突(或干扰)结束后,中继器处于空闲状态,即中继器两端的收发器均处于接收状态。
5 结 论
本文提出了由CA555组成的相对延时单稳触发电路,并应用于RS-485总线中继器的设计中。它使得RS-485收发器的数据发送状态只由RS-485中继器接收数据端数据的一个或连续多个低电平位来控制,与一数据位时间宽度无关,即与总线传输数据的波特率无关,所以本文设计的RS-485总线中继器自适应任何波特率数据的RS-485总线中继传输。实践证明,该波特率自适应RS-485中继器是可靠的。
在工业现场应用中,RS-485总线的通信速度一般为2 400~115 200 bps,以前设计的RS-485中继器控制RS-485收发器收发状态,以一数据帧时间宽度为单元。不同的波特率,控制RS-485收发器收发状态的时间宽度也不同,所以RS-485总线的通信速度不同,需设置控制RS-485收发器收发状态的时间宽度,以适应所应用RS-485总线的通信速度。
波特率自适应RS-485中继器的设计思路是:控制RS-485收发器收发状态,以一数据位时间宽度为单元。若控制RS-485收发器收发状态时间宽度适应任意波特率的一数据位时间宽度,则RS-485中继器适应任意RS-485总线的通信速度。为此设计波特率自适应RS-485中继器,如图4所示。
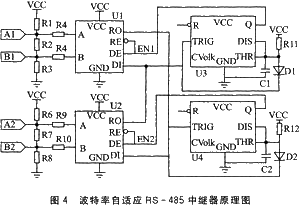
U3、U4为由CA555组成的相对延时单稳触发电路,分别控制RS-485中继器数据左、右传状态。相对延时单稳触发电路是在由CA555组成的普通单稳触发电路的基础上增加了二极管D1和D2。当CA555输入引脚TRIG为低电平时,CA555内部和二极管D1、D2将RC延时电路放电,输出Q端输出高电平;当CA555输入引脚TRIG变为高电平时,CA555内部和二极管D1、D2开始使RC延时电路充电,延时一段时间(与R×C有关),输出Q端输出低电平。其输入、输出信号时序如图5所示。
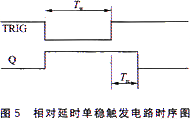
图5中,TRIG为CA555的输入信号;Q为CA555的输出信号;Tw为单个或连续低电平数据位的时间宽度;Trc为U3、U4组成的单稳触发电路中R11×C1(或R12×C2)决定的延时时间宽度,选择小于RS-485总线最高波特率(如115 200 bps)的 数据位的时间宽度为宜。在本设计中,控制RS-485收发器收发状态的时间宽度始终比总线中传输数据低电平宽度大Trc,而且Trc不会大于任何波特率的一个数据位的时间宽度。所以本文设计的波特率自适应RS-485中继器适应于工业现场应用RS-485总线的任意通信速度。
由于波特率自适应RS-485中继器以一数据位时间宽度为单元,所以只有传输低电平数据位时,输出端RS-485收发器的输出使能才打开,并输出低电平。当传输高电平数据位时,输出端RS-485收发器的输出使能关闭,RS-485收发器的输出为高阻状态。所以,在每端RS-485收发器的输出端需增加上拉电阻、下拉电阻和匹配电阻构成的偏置电路,当输出为高阻状态时,在匹配电阻上形成表示高电平的差分信号并输出。
为提高波特率自适应RS-485中继器的可靠性,可将U3的输出端经一反相器与U4的低电平有效的复位端R连接;将U4的输出端经一反相器与U3的低电平有效的复位端R连接。这样,当从RS-485中继器的一侧向另一侧传输数据时,消除了同时向相反方向传输数据的可能性。
当总线上干扰较大时也有可能发生总线冲突,数据右传状态和数据左传状态同时发生。由于实际电路的不完全对称,波特率自适应RS-485中继器只能向一个方向传输数据,并且当总线冲突(或干扰)结束后,中继器处于空闲状态,即中继器两端的收发器均处于接收状态。
5 结 论
本文提出了由CA555组成的相对延时单稳触发电路,并应用于RS-485总线中继器的设计中。它使得RS-485收发器的数据发送状态只由RS-485中继器接收数据端数据的一个或连续多个低电平位来控制,与一数据位时间宽度无关,即与总线传输数据的波特率无关,所以本文设计的RS-485总线中继器自适应任何波特率数据的RS-485总线中继传输。实践证明,该波特率自适应RS-485中继器是可靠的。
收发器 电压 总线 单片机 电阻 电容 电路 电子 555 二极管 相关文章:
- 采用0.18um CMOS设计用于2.5Gb/s收发器系统的16:1复用器电路(09-15)
- RS-485自收发电路的参考设计(01-20)
- 利用电荷泵为高速CAN收发器供电(02-23)
- 信号链基础知识 RS-485:总线电流要求与收发器驱动能力(04-27)
- 压控振荡器(VCO)的设计(03-25)
- 基于LPC2119的配电控制模块设计(02-27)