dsPIC及其在交流变频调速中的应用研究
时间:09-02
来源:互联网
点击:
在现代交流调速中,越来越多地采用交流变频调速。PWM变频器与鼠笼型电机的结合,就性价比而言是公认的优选方案。Microchip公司生产的16位微处理器dsPIC30F4012具有片内波形发生器,是专为电机高速控制而设计的。本文引入了dsPIC30F4012芯片,并介绍采用它与IPM模块结合实现的全数字化SPWM变频调速系统的构成及基本算法。系统主电路采用交直一交电压型变频方式,逆变电路采用三菱电机推出的第4代智能功率模块 PM100CVA120,给出实验结果。实验结果表明,系统有较好的控制效果,具有较高性价比,有广泛的应用前景。
1 控制芯片dsPIC30F4012介绍
dsPIC30F4012是Microchip公司专门为电机高速控制所设计的一种16位微处理器。它有1个16位CPU和1个DSP内核。当内部时钟频率为最高120 MHz时,进行一次16位×16位运算,为8.3ns;另外包括2048 B的寄存器RAM,48KB的片内程序空间,1024 B的EEP—ROM,中断7个I/O口共21条I/O口线;有1路全双工的UART功能模块,1个同步串行SPI功能模块,1个I2C串行通信模块和1个 CAN串行通信模块;片内设有1个6通道的A/D转换器,工作在10位模式,采样保持时间、转换时间、阀值检测方式和零偏补偿校正均可编程;5个16位定时器;有4路捕捉器、2路比较/标准脉宽调制单元(PWM)模块;1个6通道的电机专用MCPWM控制器。
dsPIC30F4012片内 MCPWM电机专用PWM控制器,是其特色设计之一。这一设置大大简化了产生PWM波形的控制软件和外部硬件,通过编程可产生独立的、具有相同频率和工作方式的三相6路PWM波形,并由RE口直接输出6路PWM信号给逆变器,且三相互补不重叠。每个引脚驱动电流达25mA。为防止同一桥臂上2个功率管发生直通造成短路,该发生器还可通过编程设置死区互锁时间,在外部时钟10MHz经内部8倍频后系统时钟为80MHz时,死区时间范围根据分频系数的不同分为:①系数为1∶1时,在50ns~3.15μs之间;②系数为1∶2时,在100ns~6.3μs之间;③系数为1∶4时,在200ns~12.6μs 之间;④系数为1∶8时,在400ns~25.2μs之间。
2 系统组成及基本算法
2 1系统硬件组成
变频器的总体结构框图如图1所示,由控制部分和主电路部分组成。主电路部分采用交-直-交变频方式。三相工频电压经整流桥整流后,再经电容平滑滤波后得到 600V直流电压,送逆变器IPM模块PM100CVA120的输入端P、N。IPM模块是三菱电机推出的第4代智能功率模块,内部含有1个三相H型逆变桥的6个IGBT和6个快速功率二极管及其相应的驱动电路。另外,含有过流保护、短路保护、驱动电源欠压保护、过热保护、报警输出等,其所用元件数量比传统IPM少得多,相应可靠性也得到提高。由于这种带IGBT驱动电路且具有自诊断功能及保护功能完善的IPM模块的应用,使本系统体积更小,更可靠,更具智能化。

系统控制部分由dsPIC30F4012微处理器专用系统(包括相应软件)、信号检测电路、驱动与保护电路等组成,主要完成逆变桥SPWM驱动信号的产生、信号检测及故障处理、故障显示、操纵盒按键检测及逻辑控制、及时显示变频器频率等。dsPIC30F4012微处理器是控制系统的核心。它接收外部信息,按预定算法实时计算三相SPWM波形数据,并由它产生三相6路SPWM信号,从RE口输出,然后再经驱动电路去驱动逆变功率开关,完成三相SPWM逆变。
系统频率为80MHz,SPWM的正弦控制波频率由键盘设置,dsPIC30F4012微处理器通过计算把存储在片内EPROM中的正弦函数的数据送到6 通道的电机专用PWM控制器。波形发生器产生的三相互补的SPWM信号经PWMO~PWM5端输出,送至IPM驱动信号输入端。为保证系统安全工作,逆变器设置了过流、过压、过热、缺相、短路、过载等多种保护功能,所有保护信号均通过一组中断逻辑送至dsPIC30F4012的FLTA脚。只要任何一路保护起作用,都将封锁6通道的电机专用PWM控制器输出,禁止三相PWM波的产生,及时对IPM驱动电路进行封锁,保护IPM及其他电路不致损坏。
2.2系统软件设计
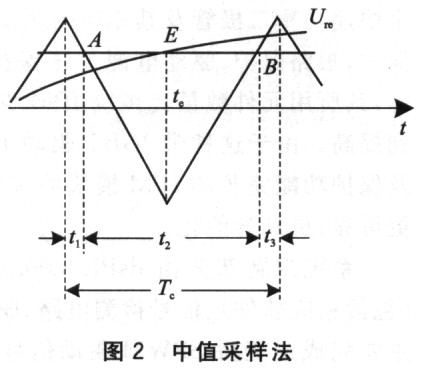
本系统使用规则采样法,用软件方式产生SPWM波,克服了模拟元件实现方式的缺点。规则采样法如图2所示。图中用的是中值采样,以三角波的中值点(底点) 作为采样点,通过该点对应的正弦波的取值点E,作平行于时间轴线的直线。该线与三角波的交点为A、B。A、B点间宽度即为PWM波脉宽,用t2表示脉宽,则有关系:

式中Tc为三角波周期,M为调制度,ω为正弦波的角频率,te为采样时刻。
三相SPWM的脉宽计算公式为:
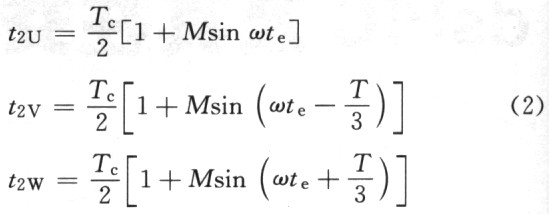
其中T为正弦波的周期。在用微机产生SPWM波形时,为使三相SPWM波形对称,调制比N应为3的整数倍。从消除谐波考虑,N越大越好;但N的值要受到功率开关器件的开断频率和计算机运算速度的限制。这里采用分段同步调制的方法,不同频率段N值不同,将正弦函数按载波比N离散制成表,并将半载波周期也制成表,微机通过查表法与实时计算法相结合,计算出脉宽值送入PDCX中去。
PTPER的计算公式如下:

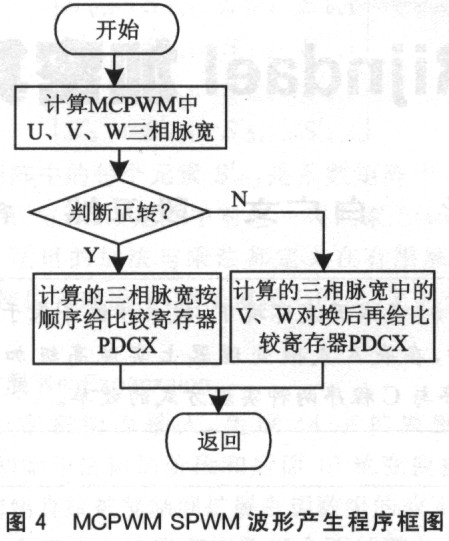
式中:fosc为晶振频率;fpwM为MCPWM输出波形频率(载波频率),fPWM=Nfmin。fsin为正弦调制波频率,fsin=1/T。 fPWM="1"/Tc。系统软件由主程序、故障中断子程序、显示子程序、键盘服务程序、MCPWM中断、A/D采样中断子程序等组成。主程序主要完成系统的初始化,并根据显示模式计算要显示的数据并送显示,键盘扫描及服务处理,输入数据的码制变换等。故障中断子程序中,视故障性质完成自处理或故障报警,封锁触发脉冲、跳闸等。图3为主程序流程。由于本芯片特点之一是有完善的保护功能,只要在PTCON命令寄存器中写入相应的控制命令字,系统就能在发生故障时立即封锁脉冲。在FLTA中断服务程序中,通过读取不同的I/O口来进一步识别是发生了何种中断,并显示。图4为MCPWM中断子程序框图。

1 控制芯片dsPIC30F4012介绍
dsPIC30F4012是Microchip公司专门为电机高速控制所设计的一种16位微处理器。它有1个16位CPU和1个DSP内核。当内部时钟频率为最高120 MHz时,进行一次16位×16位运算,为8.3ns;另外包括2048 B的寄存器RAM,48KB的片内程序空间,1024 B的EEP—ROM,中断7个I/O口共21条I/O口线;有1路全双工的UART功能模块,1个同步串行SPI功能模块,1个I2C串行通信模块和1个 CAN串行通信模块;片内设有1个6通道的A/D转换器,工作在10位模式,采样保持时间、转换时间、阀值检测方式和零偏补偿校正均可编程;5个16位定时器;有4路捕捉器、2路比较/标准脉宽调制单元(PWM)模块;1个6通道的电机专用MCPWM控制器。
dsPIC30F4012片内 MCPWM电机专用PWM控制器,是其特色设计之一。这一设置大大简化了产生PWM波形的控制软件和外部硬件,通过编程可产生独立的、具有相同频率和工作方式的三相6路PWM波形,并由RE口直接输出6路PWM信号给逆变器,且三相互补不重叠。每个引脚驱动电流达25mA。为防止同一桥臂上2个功率管发生直通造成短路,该发生器还可通过编程设置死区互锁时间,在外部时钟10MHz经内部8倍频后系统时钟为80MHz时,死区时间范围根据分频系数的不同分为:①系数为1∶1时,在50ns~3.15μs之间;②系数为1∶2时,在100ns~6.3μs之间;③系数为1∶4时,在200ns~12.6μs 之间;④系数为1∶8时,在400ns~25.2μs之间。
2 系统组成及基本算法
2 1系统硬件组成
变频器的总体结构框图如图1所示,由控制部分和主电路部分组成。主电路部分采用交-直-交变频方式。三相工频电压经整流桥整流后,再经电容平滑滤波后得到 600V直流电压,送逆变器IPM模块PM100CVA120的输入端P、N。IPM模块是三菱电机推出的第4代智能功率模块,内部含有1个三相H型逆变桥的6个IGBT和6个快速功率二极管及其相应的驱动电路。另外,含有过流保护、短路保护、驱动电源欠压保护、过热保护、报警输出等,其所用元件数量比传统IPM少得多,相应可靠性也得到提高。由于这种带IGBT驱动电路且具有自诊断功能及保护功能完善的IPM模块的应用,使本系统体积更小,更可靠,更具智能化。
系统控制部分由dsPIC30F4012微处理器专用系统(包括相应软件)、信号检测电路、驱动与保护电路等组成,主要完成逆变桥SPWM驱动信号的产生、信号检测及故障处理、故障显示、操纵盒按键检测及逻辑控制、及时显示变频器频率等。dsPIC30F4012微处理器是控制系统的核心。它接收外部信息,按预定算法实时计算三相SPWM波形数据,并由它产生三相6路SPWM信号,从RE口输出,然后再经驱动电路去驱动逆变功率开关,完成三相SPWM逆变。
系统频率为80MHz,SPWM的正弦控制波频率由键盘设置,dsPIC30F4012微处理器通过计算把存储在片内EPROM中的正弦函数的数据送到6 通道的电机专用PWM控制器。波形发生器产生的三相互补的SPWM信号经PWMO~PWM5端输出,送至IPM驱动信号输入端。为保证系统安全工作,逆变器设置了过流、过压、过热、缺相、短路、过载等多种保护功能,所有保护信号均通过一组中断逻辑送至dsPIC30F4012的FLTA脚。只要任何一路保护起作用,都将封锁6通道的电机专用PWM控制器输出,禁止三相PWM波的产生,及时对IPM驱动电路进行封锁,保护IPM及其他电路不致损坏。
2.2系统软件设计
本系统使用规则采样法,用软件方式产生SPWM波,克服了模拟元件实现方式的缺点。规则采样法如图2所示。图中用的是中值采样,以三角波的中值点(底点) 作为采样点,通过该点对应的正弦波的取值点E,作平行于时间轴线的直线。该线与三角波的交点为A、B。A、B点间宽度即为PWM波脉宽,用t2表示脉宽,则有关系:
式中Tc为三角波周期,M为调制度,ω为正弦波的角频率,te为采样时刻。
三相SPWM的脉宽计算公式为:
其中T为正弦波的周期。在用微机产生SPWM波形时,为使三相SPWM波形对称,调制比N应为3的整数倍。从消除谐波考虑,N越大越好;但N的值要受到功率开关器件的开断频率和计算机运算速度的限制。这里采用分段同步调制的方法,不同频率段N值不同,将正弦函数按载波比N离散制成表,并将半载波周期也制成表,微机通过查表法与实时计算法相结合,计算出脉宽值送入PDCX中去。
PTPER的计算公式如下:
式中:fosc为晶振频率;fpwM为MCPWM输出波形频率(载波频率),fPWM=Nfmin。fsin为正弦调制波频率,fsin=1/T。 fPWM="1"/Tc。系统软件由主程序、故障中断子程序、显示子程序、键盘服务程序、MCPWM中断、A/D采样中断子程序等组成。主程序主要完成系统的初始化,并根据显示模式计算要显示的数据并送显示,键盘扫描及服务处理,输入数据的码制变换等。故障中断子程序中,视故障性质完成自处理或故障报警,封锁触发脉冲、跳闸等。图3为主程序流程。由于本芯片特点之一是有完善的保护功能,只要在PTCON命令寄存器中写入相应的控制命令字,系统就能在发生故障时立即封锁脉冲。在FLTA中断服务程序中,通过读取不同的I/O口来进一步识别是发生了何种中断,并显示。图4为MCPWM中断子程序框图。
PWM Microchip PIC 电路 电压 DSP 逆变器 电流 电容 IGBT 二极管 PTC 相关文章:
- CMOS求和比较器在PWM开关电源控制中的应用(11-27)
- 改善 PWM 电源控制器低负载运行的缓冲放大器和 LED(01-16)
- 负输出罗氏变换器实用性剖析(01-09)
- 一种新型ZCS-PWM Buck变换器研究(02-20)
- PWM技术实现方法综述(02-19)
- 基于HPWM技术的大功率正弦超声波逆变电源(02-26)