基于DSP和CPLD技术的多路ADC系统的设计与实现
时间:06-11
来源:互联网
点击:
引言
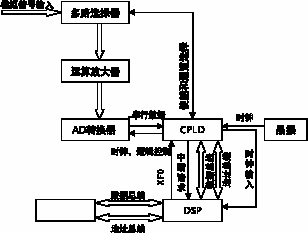
随着现代电子技术的应用和发展,数字信号处理的内容日益复杂,而ADC是实现从模拟到数字转换的一个必然过程。针对这种情况,利用数字信号处理器和可编程逻辑器件提出了多路ADC系统的设计方法,实现了对动态多路模拟输入信号的采样传输以及处理,简化了电路设计,可编程逻辑器件使得系统的通用性和可移植性得到良好的扩展。系统框图如图1所示。
系统硬件设计
本设计所采用的ADC器件是MAXIM公司的生产的低功耗16位模数转换器(ADC)MAX1162。MAX1162采用逐次逼近型ADC结构,具有自动关断、1.1μs快速唤醒和兼容于SPI/QSPI/MICROWIRE的高速接口,采用+5V单模拟电源,并且具有独立的数字电源引脚,允许芯片直接和+2.7~+5.25V的数字逻辑接口。REF引脚接外部参考电压,用于设定模拟输入电压范围,与模拟地之间连接一个4.7μF的电解电容;AVDD引脚是+5V电源供应输入端,与模拟地之间接一个0.1μF的电容;AGND是模拟地;CS是片选输入,低有效。当为高时,系统处于断电模式,由高变低时,激活系统到正常运行模式,同时初始化一次转换。本系统选择作为AD的使能信号;SCLK是串行时钟输入,驱动模数转换进程;DOUT是串行数据输出,数据状态在SCLK的下降沿改变;DGND是数字地;DVDD是数字电压供应,与数字地之间接一个0.1μF的电容;AIN是模拟信号输入端。
该ADC系统的中央控制单元采用TI(德州仪器)公司的浮点数字信号处理器TMS320VC33-150,TMS320VC33的地址总线为24位,程序寻址范围可达16M,数据总线为32位,内部具有34K×32bit的SRAM,可根据需要映射在程序或数据空间,拥有一路串行口,可以构成传输8、16、24、32位的数据,其传输模式可以设置为突发模式或者是连续模式。两个32位的通用定时器,能够用来按照规定的时间间隔与芯片内部通信或者是和外部通信。
本系统考虑到主要应用在ADC中,所以就直接采用TMS320VC33的数据总线和地址总线,没有再附加额外的电路,使得ADC的采样速度和转换精度得到良好的保证。同时还利用了INT2和XF0引脚,作为DSP接收数据的中断信号和ADC的使能信号。INT2是外部中断引脚,由外部的数据输入触发中断;XF0即外部标志输出引脚,受软件控制,可以用来向外部器件发送信号,该引脚的状态由I/O标志寄存器决定,IOF=0X22,即置XF0为通用目的输出引脚,同时该引脚输出0;若IOF=0X26,则置XF0为通用目的输出引脚,同时该引脚输出为1。本系统利用软件指令对XF0进行置高置低,控制ADC的启动转换和停止。
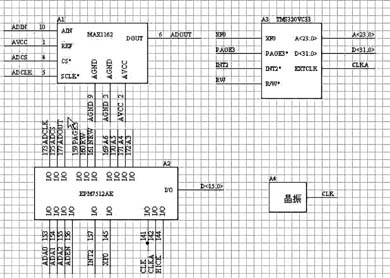
EMP7512AE基于EEPROM技术,采用多电压I/O接口技术,系统内核供应电压为3.3V,而I/0引脚与2.5V、3.3V、5.0V逻辑电平相互兼容。EPM7512AE有10 000个可用门、512个宏单元、32个逻辑阵列块和212个用户可用I/0引脚。CPLD在系统中的主要功能是:给ADC转换提供时钟信号,控制ADC转换的使能和复位,由于采用的ADC芯片是串行输出的,CPLD还实现对串行数据的输入转为并行数据的输出,然后直接和TMS320VC33的数据总线相连接。同时CPLD产生脉冲信号,在ADC转换完成后,数据暂存在CPLD中,该脉冲向CPU申请中断,提示有数据需要接收。另外,CPLD的一个关键作用就是,实现路数的动态选择,目前设计的该系统最多路数为8路。CPLD和DSP及AD芯片的具体硬件连接图如图2所示。
系统软件设计
在软件设计中,通过CPLD程序对ADC转换进行动态控制,选通模拟信号输入端,对ADC进行使能,按照图3所示的转换时序图完成对MAX1162的数据采样及传输。
下面给出VHDL语言的主要程序部分。

BEGIN
ADCS <= SYNTHESIZED_WIRE_12;
ADA <= SYNTHESIZED_WIRE_2;
GDFX_TEMP_SIGNAL_1 <= (L & L & H & H & H & L);
GDFX_TEMP_SIGNAL_0 <= (H & L & H & H & L);
U1 : lpm_bustri_0----三态总线缓冲器,允许采样的数据输出到DSP的数据总线上
PORT MAP(enabledt => DRD,
data => ADO,
tridata => D);
U2 : lpm_counter_1----计数器,把数据总线宽度改为3位
PORT MAP(sload => SYNTHESIZED_WIRE_0,
clock => SYNTHESIZED_WIRE_1,
aload => XFA0,
data => CMD(2 downto 0),
q => SYNTHESIZED_WIRE_2);
U3 : lpm_dff_1---D触发器,数据总线宽度为8位,接收来自于DSP的数据
PORT MAP(clock => CMDCK,
data => D(7 downto 0),
q => CMD);
U4 : lpm_compare_1---比较器,比较CMD(5..3)和CMD(2..0)的值,即轮询采样通道
PORT MAP(dataa => CMD(5 downto 3),
datab => SYNTHESIZED_WIRE_2,
aeb => SYNTHESIZED_WIRE_0);
SYNTHESIZED_WIRE_1 <= NOT(AQ(4));
NRW<= NOT RW;
CMDCK<= NOT( NOT PAGE3 AND(NOT RW)AND A6 AND A5 AND A4 AND (NOT A3));
----通道控制地址编码
DRD <= NOT PAGE3 AND RW AND A6 AND A5 AND A4 AND A3;----采样地址编码
CLKA <= NOT(CLK);
U5 : lpm_counter_2---产生计数脉冲
PORT MAP(sload => SYNTHESIZED_WIRE_3,
clock => HFP(5),
data => GDFX_TEMP_SIGNAL_0,
eq => SQ,
q => AQ);
U5 : lpm_dff_5---缓冲器
PORT MAP(clock => SYNTHESIZED_WIRE_12,
data => SYNTHESIZED_WIRE_5,
q => ADO);
SYNTHESIZED_WIRE_12 <= SQ(12) OR 0 OR XFA0;
SYNTHESIZED_WIRE_3 <= XFA0 OR SQ(14);
ADEN <= NOT(XFA0);
SYNTHESIZED_WIRE_10 <= HFP(5) AND HFP(4) AND HFP(0) AND SYNTHESIZED_WIRE_6 AND SYNTHESIZED_WIRE_7 AND SYNTHESIZED_WIRE_8;
SYNTHESIZED_WIRE_7 <= NOT(HFP(2));
SYNTHESIZED_WIRE_6 <= NOT(HFP(3));
INTA2 <= XFA0 OR SYNTHESIZED_WIRE_9;
U6 : lpm_shiftreg_1----串行数据输入转为并行数据输出
PORT MAP(shiftin => ADOUT,
clock => HFP(5),
q => SYNTHESIZED_WIRE_5);
U7 : lpm_counter_3---产生时钟信号
PORT MAP(sload => SYNTHESIZED_WIRE_10,
clock => H1CK,
data => GDFX_TEMP_SIGNAL_1,
q => HFP);
SYNTHESIZED_WIRE_8 <= NOT(HFP(1));
ADSCK <= NOT(HFP(5));
SYNTHESIZED_WIRE_9 <= NOT(SYNTHESIZED_WIRE_12);
H <= '1';
L <= '0';
END;
把该VHDL程序写入到EPM7512AE芯片中的,对数据进行采样编程就简单了许多。在.CMD文件的MEMORY段中加入ADPORT :org=0x00c00070,len=9。然后通过自定义数据段把数组adport[8]映射到段ADPORT中。下面给出用C编写的采样主要程序。
Main()
{
……
IOF = 0x26;/*置MAX1162数据输出端为高阻态*/
adport[0] = 0x28;
/*采样通道选择:0通道~5通道,总共6路;若设adport[0]=0x38,则通道为:0通道~7通道,总共8路。同理可进行其他设置*/
IE = 4;/*中断使能*/
IOF = 0x22;/*启动ADC*/
/* adport[0]对应地址为0x00c00070,配置寄存器有6位,0、1、2位对应起始通道,3、4、5位对应结束通道。adport[8]对应地址为0x00c00078,是控制寄存器*/
……
}
在中断服务子程序接收采样的数据,程序如下。
C_INT02()
{
ad[adi++] = adport[8];/*把采集的数据十六进制数据存入数组ad中*/
If(adi>0x7ff) /*存入的数据大小为2K×16bit,根据内存大小动态改变*/
adi &= ox7ff;
}
随着现代电子技术的应用和发展,数字信号处理的内容日益复杂,而ADC是实现从模拟到数字转换的一个必然过程。针对这种情况,利用数字信号处理器和可编程逻辑器件提出了多路ADC系统的设计方法,实现了对动态多路模拟输入信号的采样传输以及处理,简化了电路设计,可编程逻辑器件使得系统的通用性和可移植性得到良好的扩展。系统框图如图1所示。
系统硬件设计
本设计所采用的ADC器件是MAXIM公司的生产的低功耗16位模数转换器(ADC)MAX1162。MAX1162采用逐次逼近型ADC结构,具有自动关断、1.1μs快速唤醒和兼容于SPI/QSPI/MICROWIRE的高速接口,采用+5V单模拟电源,并且具有独立的数字电源引脚,允许芯片直接和+2.7~+5.25V的数字逻辑接口。REF引脚接外部参考电压,用于设定模拟输入电压范围,与模拟地之间连接一个4.7μF的电解电容;AVDD引脚是+5V电源供应输入端,与模拟地之间接一个0.1μF的电容;AGND是模拟地;CS是片选输入,低有效。当为高时,系统处于断电模式,由高变低时,激活系统到正常运行模式,同时初始化一次转换。本系统选择作为AD的使能信号;SCLK是串行时钟输入,驱动模数转换进程;DOUT是串行数据输出,数据状态在SCLK的下降沿改变;DGND是数字地;DVDD是数字电压供应,与数字地之间接一个0.1μF的电容;AIN是模拟信号输入端。
该ADC系统的中央控制单元采用TI(德州仪器)公司的浮点数字信号处理器TMS320VC33-150,TMS320VC33的地址总线为24位,程序寻址范围可达16M,数据总线为32位,内部具有34K×32bit的SRAM,可根据需要映射在程序或数据空间,拥有一路串行口,可以构成传输8、16、24、32位的数据,其传输模式可以设置为突发模式或者是连续模式。两个32位的通用定时器,能够用来按照规定的时间间隔与芯片内部通信或者是和外部通信。
本系统考虑到主要应用在ADC中,所以就直接采用TMS320VC33的数据总线和地址总线,没有再附加额外的电路,使得ADC的采样速度和转换精度得到良好的保证。同时还利用了INT2和XF0引脚,作为DSP接收数据的中断信号和ADC的使能信号。INT2是外部中断引脚,由外部的数据输入触发中断;XF0即外部标志输出引脚,受软件控制,可以用来向外部器件发送信号,该引脚的状态由I/O标志寄存器决定,IOF=0X22,即置XF0为通用目的输出引脚,同时该引脚输出0;若IOF=0X26,则置XF0为通用目的输出引脚,同时该引脚输出为1。本系统利用软件指令对XF0进行置高置低,控制ADC的启动转换和停止。
EMP7512AE基于EEPROM技术,采用多电压I/O接口技术,系统内核供应电压为3.3V,而I/0引脚与2.5V、3.3V、5.0V逻辑电平相互兼容。EPM7512AE有10 000个可用门、512个宏单元、32个逻辑阵列块和212个用户可用I/0引脚。CPLD在系统中的主要功能是:给ADC转换提供时钟信号,控制ADC转换的使能和复位,由于采用的ADC芯片是串行输出的,CPLD还实现对串行数据的输入转为并行数据的输出,然后直接和TMS320VC33的数据总线相连接。同时CPLD产生脉冲信号,在ADC转换完成后,数据暂存在CPLD中,该脉冲向CPU申请中断,提示有数据需要接收。另外,CPLD的一个关键作用就是,实现路数的动态选择,目前设计的该系统最多路数为8路。CPLD和DSP及AD芯片的具体硬件连接图如图2所示。
系统软件设计
在软件设计中,通过CPLD程序对ADC转换进行动态控制,选通模拟信号输入端,对ADC进行使能,按照图3所示的转换时序图完成对MAX1162的数据采样及传输。
下面给出VHDL语言的主要程序部分。
BEGIN
ADCS <= SYNTHESIZED_WIRE_12;
ADA <= SYNTHESIZED_WIRE_2;
GDFX_TEMP_SIGNAL_1 <= (L & L & H & H & H & L);
GDFX_TEMP_SIGNAL_0 <= (H & L & H & H & L);
U1 : lpm_bustri_0----三态总线缓冲器,允许采样的数据输出到DSP的数据总线上
PORT MAP(enabledt => DRD,
data => ADO,
tridata => D);
U2 : lpm_counter_1----计数器,把数据总线宽度改为3位
PORT MAP(sload => SYNTHESIZED_WIRE_0,
clock => SYNTHESIZED_WIRE_1,
aload => XFA0,
data => CMD(2 downto 0),
q => SYNTHESIZED_WIRE_2);
U3 : lpm_dff_1---D触发器,数据总线宽度为8位,接收来自于DSP的数据
PORT MAP(clock => CMDCK,
data => D(7 downto 0),
q => CMD);
U4 : lpm_compare_1---比较器,比较CMD(5..3)和CMD(2..0)的值,即轮询采样通道
PORT MAP(dataa => CMD(5 downto 3),
datab => SYNTHESIZED_WIRE_2,
aeb => SYNTHESIZED_WIRE_0);
SYNTHESIZED_WIRE_1 <= NOT(AQ(4));
NRW<= NOT RW;
CMDCK<= NOT( NOT PAGE3 AND(NOT RW)AND A6 AND A5 AND A4 AND (NOT A3));
----通道控制地址编码
DRD <= NOT PAGE3 AND RW AND A6 AND A5 AND A4 AND A3;----采样地址编码
CLKA <= NOT(CLK);
U5 : lpm_counter_2---产生计数脉冲
PORT MAP(sload => SYNTHESIZED_WIRE_3,
clock => HFP(5),
data => GDFX_TEMP_SIGNAL_0,
eq => SQ,
q => AQ);
U5 : lpm_dff_5---缓冲器
PORT MAP(clock => SYNTHESIZED_WIRE_12,
data => SYNTHESIZED_WIRE_5,
q => ADO);
SYNTHESIZED_WIRE_12 <= SQ(12) OR 0 OR XFA0;
SYNTHESIZED_WIRE_3 <= XFA0 OR SQ(14);
ADEN <= NOT(XFA0);
SYNTHESIZED_WIRE_10 <= HFP(5) AND HFP(4) AND HFP(0) AND SYNTHESIZED_WIRE_6 AND SYNTHESIZED_WIRE_7 AND SYNTHESIZED_WIRE_8;
SYNTHESIZED_WIRE_7 <= NOT(HFP(2));
SYNTHESIZED_WIRE_6 <= NOT(HFP(3));
INTA2 <= XFA0 OR SYNTHESIZED_WIRE_9;
U6 : lpm_shiftreg_1----串行数据输入转为并行数据输出
PORT MAP(shiftin => ADOUT,
clock => HFP(5),
q => SYNTHESIZED_WIRE_5);
U7 : lpm_counter_3---产生时钟信号
PORT MAP(sload => SYNTHESIZED_WIRE_10,
clock => H1CK,
data => GDFX_TEMP_SIGNAL_1,
q => HFP);
SYNTHESIZED_WIRE_8 <= NOT(HFP(1));
ADSCK <= NOT(HFP(5));
SYNTHESIZED_WIRE_9 <= NOT(SYNTHESIZED_WIRE_12);
H <= '1';
L <= '0';
END;
把该VHDL程序写入到EPM7512AE芯片中的,对数据进行采样编程就简单了许多。在.CMD文件的MEMORY段中加入ADPORT :org=0x00c00070,len=9。然后通过自定义数据段把数组adport[8]映射到段ADPORT中。下面给出用C编写的采样主要程序。
Main()
{
……
IOF = 0x26;/*置MAX1162数据输出端为高阻态*/
adport[0] = 0x28;
/*采样通道选择:0通道~5通道,总共6路;若设adport[0]=0x38,则通道为:0通道~7通道,总共8路。同理可进行其他设置*/
IE = 4;/*中断使能*/
IOF = 0x22;/*启动ADC*/
/* adport[0]对应地址为0x00c00070,配置寄存器有6位,0、1、2位对应起始通道,3、4、5位对应结束通道。adport[8]对应地址为0x00c00078,是控制寄存器*/
……
}
在中断服务子程序接收采样的数据,程序如下。
C_INT02()
{
ad[adi++] = adport[8];/*把采集的数据十六进制数据存入数组ad中*/
If(adi>0x7ff) /*存入的数据大小为2K×16bit,根据内存大小动态改变*/
adi &= ox7ff;
}