CAN-bus应用方案
时间:08-30
来源:互联网
点击:
4 由网络供电的DeviceNet节点
4.1 应用范围
DeviceNet中由网络供电的节点
5线通讯
高速数据通讯
无需独立输入电源
可用作为通用CAN-bus节点
适合于传感器设备、微型执行器设备
4.2 基本电路框图
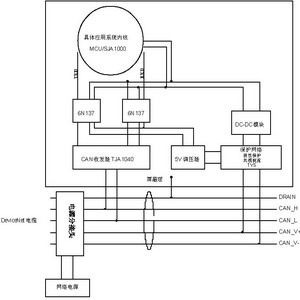
图5 DeviceNet中的由网络供电节点功能框图
4.3 元件选型
CAN控制器采用PHILIPS的SJA1000芯片。如果针对小型应用系统的设计要求,可以采用集成CAN控制器的PHILIPS P87C591微处理器芯片。
CAN收发器选用PHILIPS的高速CAN收发器TJA1040或TJA1050,具有速率高、低功耗、电磁性能优越等特点,自检错能力强,可工作于睡眠模式。
采用高速光耦来实现收发器与控制器之间的电气隔离,保护系统电路。光耦选择高速器件,推荐型号:6N137或TLP113,以满足在最高速率500Kbps下的电气响应。
采用DC-DC模块向应用系统供应电源,可有效抑制干扰,提高可靠性。由于网络电源存在电压波动大(电压波动>±30%)、干扰信号多等缺点,因此,应该选择宽电压输入隔离(隔离电压≥1000VDC)稳压单输出型DC/DC模块给系统供电。推荐型号:金升阳的PH2405S-01(Vin:9~27VDC,Vout:5VDC,Iout :100~200mA);或者,根据具体应用系统内核所需功率不同,也可选用PH2405D-03(Vin:9~27VDC,Vout:5VDC,Iout :≤500mA)。为确保该系统的安全,建议在DC/DC模块及系统的前端接TVS、共模扼流圈、极性保护,以防止雷击、浪涌、极性反接,起良好的保护效果。
微处理器可以选用PHILIPS的P87C58x2芯片,内含32K EPROM,可工作于6 Clock模式,晶振频率可达30MHz,满足DeviceNet的通讯任务编程要求。
4.4 软件开发流程框图
软件开发流程与图4相同。
5 推荐开发工具
仿真器: 采用HOOKS技术的TKS系列仿真器 等
调试工具 DP-51下载实验仪、DP-668下载实验仪 等
调试环境: Keil C51、TKStudio 等
实时多任务操作系统: Keil RTX51、uCOSII 等
CAN分析工具: ZLGCAN接口卡、ZLGCANTEST通用测试软件
分析软件: CANalyst 分析软件
附录C:SJA1000标准波特率
SJA1000独立CAN控制器的CAN通讯波特率由寄存器BTR0、BTR1、晶振等参数共同 决定。下表列出了一组推荐的BTR0、BTR1设置值,标注*符号的值是由CiA协会推荐的标准值。
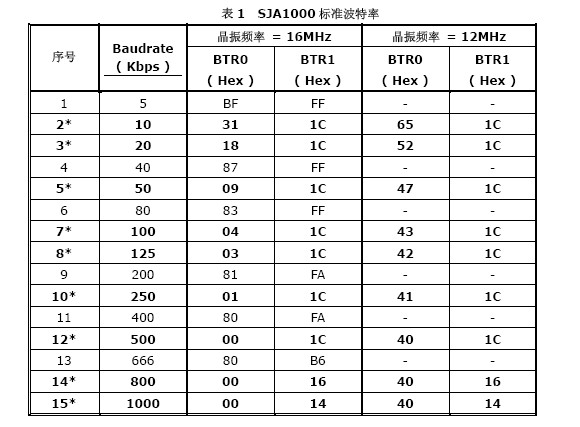
建议采用16MHz作为SJA1000的工作晶振。用户也可以根据SJA1000器件配套的参考资料自行计算合适的寄存器BTR0、BTR1设置值。
P87C591的CAN通讯波特率采用同SJA1000一致的计算方法。
参考资料:
《SJA1000独立的CAN控制器》
《SJA1000独立的CAN控制器应用指南》
《确定SJA1000 CAN控制器的位定时参数》
4.1 应用范围
DeviceNet中由网络供电的节点
5线通讯
高速数据通讯
无需独立输入电源
可用作为通用CAN-bus节点
适合于传感器设备、微型执行器设备
4.2 基本电路框图
图5 DeviceNet中的由网络供电节点功能框图
4.3 元件选型
CAN控制器采用PHILIPS的SJA1000芯片。如果针对小型应用系统的设计要求,可以采用集成CAN控制器的PHILIPS P87C591微处理器芯片。
CAN收发器选用PHILIPS的高速CAN收发器TJA1040或TJA1050,具有速率高、低功耗、电磁性能优越等特点,自检错能力强,可工作于睡眠模式。
采用高速光耦来实现收发器与控制器之间的电气隔离,保护系统电路。光耦选择高速器件,推荐型号:6N137或TLP113,以满足在最高速率500Kbps下的电气响应。
采用DC-DC模块向应用系统供应电源,可有效抑制干扰,提高可靠性。由于网络电源存在电压波动大(电压波动>±30%)、干扰信号多等缺点,因此,应该选择宽电压输入隔离(隔离电压≥1000VDC)稳压单输出型DC/DC模块给系统供电。推荐型号:金升阳的PH2405S-01(Vin:9~27VDC,Vout:5VDC,Iout :100~200mA);或者,根据具体应用系统内核所需功率不同,也可选用PH2405D-03(Vin:9~27VDC,Vout:5VDC,Iout :≤500mA)。为确保该系统的安全,建议在DC/DC模块及系统的前端接TVS、共模扼流圈、极性保护,以防止雷击、浪涌、极性反接,起良好的保护效果。
微处理器可以选用PHILIPS的P87C58x2芯片,内含32K EPROM,可工作于6 Clock模式,晶振频率可达30MHz,满足DeviceNet的通讯任务编程要求。
4.4 软件开发流程框图
软件开发流程与图4相同。
5 推荐开发工具
仿真器: 采用HOOKS技术的TKS系列仿真器 等
调试工具 DP-51下载实验仪、DP-668下载实验仪 等
调试环境: Keil C51、TKStudio 等
实时多任务操作系统: Keil RTX51、uCOSII 等
CAN分析工具: ZLGCAN接口卡、ZLGCANTEST通用测试软件
分析软件: CANalyst 分析软件
附录C:SJA1000标准波特率
SJA1000独立CAN控制器的CAN通讯波特率由寄存器BTR0、BTR1、晶振等参数共同 决定。下表列出了一组推荐的BTR0、BTR1设置值,标注*符号的值是由CiA协会推荐的标准值。
建议采用16MHz作为SJA1000的工作晶振。用户也可以根据SJA1000器件配套的参考资料自行计算合适的寄存器BTR0、BTR1设置值。
P87C591的CAN通讯波特率采用同SJA1000一致的计算方法。
参考资料:
《SJA1000独立的CAN控制器》
《SJA1000独立的CAN控制器应用指南》
《确定SJA1000 CAN控制器的位定时参数》
自动化 汽车电子 电路 单片机 总线 电阻 MCU 收发器 电压 电流 传感器 电源模块 开关电源 C语言 仿真 Keil 相关文章:
- 中压电力线通信技术(01-07)
- 北京华深校园办公自动化系统方案(02-14)
- 基于DSP技术的变电站综合自动化系统简介(11-10)
- 数据中心的网络虚拟化和自动化(01-31)
- OFDM调制技术的配电自动化通信系统研究(02-17)
- 基于ITIL的云计算实施方案 (02-08)