双频带GPS/Galileo射频前端接收系统的设计方案
本方案结合现有资源,给出一种接收机的设计实例,重点分析了混频部分、本振部分及控制部分的实现方法并给出了具体的电路设计。通过利用频谱仪及射频信号发生器对设计实例进行系统测试,系统的整机增益和噪声系数全部符合设计指标。
0 引言
全球导航卫星系统GNSS(Global Navigation Satel-lite System)近年来得到了广泛的引用,从而引发相关领域的高度关注。目前的接收机模式无法满足日益增长的使用精度要求。所以,在原有的单模接收机的基础上研发更高精度、更加稳定耐用的双模接收机成为研究的核心。
本文提出了一种GPS/Galileo双频双模接收机射频前端系统的设计方案,该方案结合现有资源,展示出了该种接收机设计的实例。重点分析了混频部分、本振部分及控制部分的功能及实现。最后利用频谱仪及射频信号发生器等设备对实例进行系统级测试,验证了系统结构的正确性。
1 GPS/Galileo 双模双频接收机系统
1.1 接收机结构
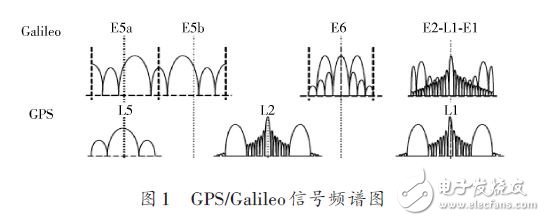
设计接收机首先要考虑的就是频带的选择。如图1所示,GPSL1/L5和GalileoE1/E5a中心频率相同,如果选择该频段的话,那么很多的元器件可以得到复用,从而极大地减少了研发和生产成本,同时也可以减小接收机的体积。
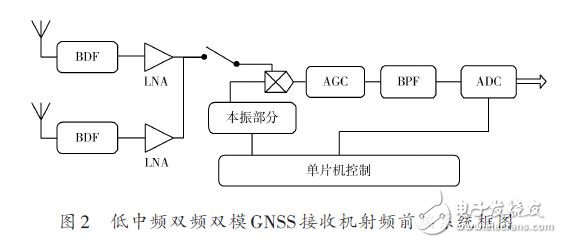
比较流行的双频双模接收机射频前端的结构大致有信号独享通道、公用信道、通过控制使某一时刻通道内只有一个载频信号三类。本设计以第三种方案为基础,在尽可能减少信号相互干扰的同时,争取最大限度地复用元器件。结构图如图2所示。
1.2 接收机系统整体性能指标
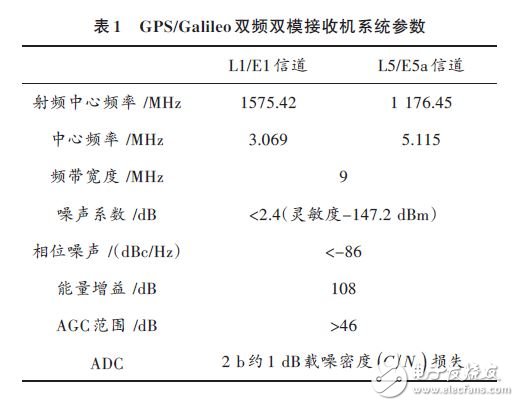
在参考接收机的性能要求的基础上,设计GPS接收机射频前端芯片的各项系统指标见表1.
2 GNSS 接收机射频前端芯片选择
考虑市场现有的相关器件的芯片资源,在GPS接收机系统整体性能指标及结构的基础上,结合各个功能电路模块的性能指标参数,为最终利用所选芯片制作实际的射频前端电路系统做准备。
2.1 低噪声放大部分
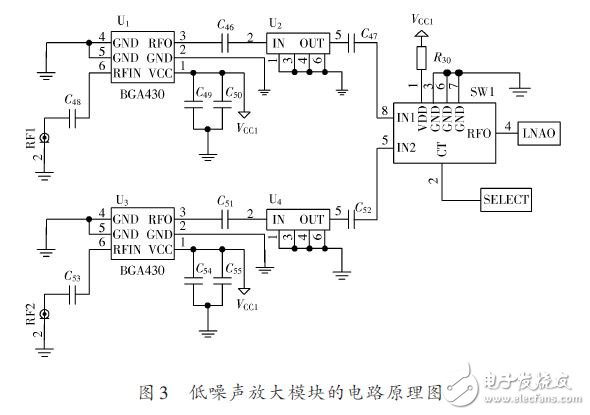
低噪声放大部分选用INFINEON TECHNOLOGIES公司的BGA430芯片。BGA430芯片为宽带高增益LNA芯片,5 V供电的情况下该芯片在导航频段的增益可以达到28 dB以上,噪声系数在2.4 dB以下。低噪声放大器的噪声系数应该尽可能的小,但又要考虑电路的设计难度和制作成本。综合以上考虑,BGA芯片同时满足系统的增益、NF及线性度的要求。其电路图如图3所示。
2.2 混频部分
设计的混频部分选用ANALOGDEVICES公司的AD8347($7.0200)芯片。其电路图如图4所示。

2.3 本振部分
本振部分选用SILICON LABS公司的Si4133($6.6811)[4]芯片。
Si4133芯片可用来进行双波段的射频合成及中频频率合成。该芯片的锁相环是时分复用的,通过对电路电感的设计,使它能很好的工作在两个不同的频率范围。另外Si4133芯片具有很低的相位噪声。因此综合以上考虑Si4133 芯片满足本设计中本振部分的需求。其电路图如图5所示。

2.4 带通滤波部分
带通滤波部分选用ANALOG DEVICES 公司的AD8132($1.9080)芯片。该芯片提供差分信号输入与输出,并且可以单电源(+5 V)供电。通过外接电容、电阻,可以分别组合形成Q、I路二阶差分有源滤波器。并通过对电容、电阻值进行调节,可以分别改变Q、I路二阶差分有源滤波器的增益及中心频率。并且经测试该芯片可以满足中心频率为4 MHz左右,-3 dB带宽为8 MHz左右,带外抑制度为-30 dB左右的条件。其电路图如图6所示。

2.5 模数转换部分
模数转换部分选用Analog Devices公司的AD9288($4.2240)芯片。其是一款双通道8位单芯片采样模数转换器,内置片内采样保持电路,编码输入为TTL/CMOS兼容,8位数字输出为TTL/CMOS兼容,单独的输出电源引脚支持3.3 V 或2.5 V 逻辑接口。能够满足本设计的具体要求并同时具有低成本、低功耗、尺寸小和易用性好等优势。其电路图如图7所示。

2.6 控制部分
控制部分由单片机完成,控制部分分为三部分:射频开关切换控制部分、本振频率切换控制部分、模数转换工作模式选择控制部分。下面分别加以说明。
对于低噪声放大部分中的射频开关控制,可以通过设置与单片机某输出管脚相连接的SELECT 的电平高低对两个信道进行切换,实现GPS L1/GALILEO E2-L1-E1信号和GPS L5/GALILEO E5a信号的分时复用。对于本振部分的射频输出信号的控制,可以在连接合适大小电感的前提下,利用单片机与芯片的串行接口配置正确的参考分频比和VCO分频比就可以使芯片的两个射频通道产生两个频率分别为1 571.328 MHz和1 171.335 MHz的本振信号,用于GPS L1/GA
- 美国GPS系统的管理与运营(02-07)
- 基于GPS的数据采集系统的研究(01-15)
- 展频技术完美解决GPS搜星灵敏度难题(01-04)
- GPS的信噪比很高,为何定位时间却很长?(05-25)
- 从技术层面上分析北斗与GPS的九大区别(05-08)
- 北斗卫星导航试验系统(北斗一代)(02-04)