基于MSP430单片机的光电跟踪伺服系统研究方案
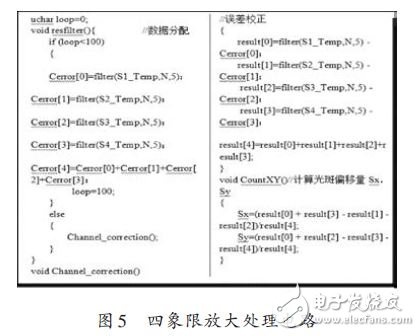
维维的空间片区性搜索,并载入判别搜到目标程序,具体通过A/D采集到的电压范围判别是否搜到目标。目标一旦搜到,即载入坐标运算程序,计算当前四象限面板与目标位置的归一化坐标差值,进而调用PID 算法程序,将PID 的调节量转化为PWM 波的输出持续时间和占空比,通过调用控制电机转动圈数程序对目标进行追踪。通道误差计算程序如图5所示。
4 PID控制算法设计
PID 算法主要有位置式算法和增量式算法两类。
一般增量式算法适用于控制精度要求不高的系统中,位置式适用于控制精度要求较高的控制系统中。
由于位置式控制算法会出现积分饱和问题。工程中通常采用的消除积分饱和问题的方法有限制PI调节器输出的方法、积分分离法和欲限削弱积分法。由于限制PI调节器输出法有可能在正常操作中不能消除系统的余差,而积分法可以在小偏差时利用积分作用消除偏差。因此本文选用位置式算法的改进形式,即积分分离法。
采用的PID控制算法的公式如下式(1)所示:4 PID控制算法设计PID 算法主要有位置式算法和增量式算法两类。
一般增量式算法适用于控制精度要求不高的系统中,位置式适用于控制精度要求较高的控制系统中[4]。
由于位置式控制算法会出现积分饱和问题。工程中通常采用的消除积分饱和问题的方法有限制PI调节器输出的方法、积分分离法和欲限削弱积分法。由于限制PI调节器输出法有可能在正常操作中不能消除系统的余差,而积分法可以在小偏差时利用积分作用消除偏差。因此本文选用位置式算法的改进形式,即积分分离法。
采用的PID控制算法的公式如下式(1)所示:

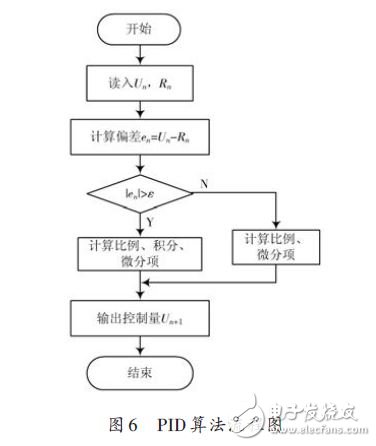
PID算法程序流程图如图6所示。研究中控制参数的确定采用先选定控制度,依据不同的控制度预设控制参数通过实验输出波形,调整控制参数取值,从而达到研究期望的控制精度。
5 测试结果及分析
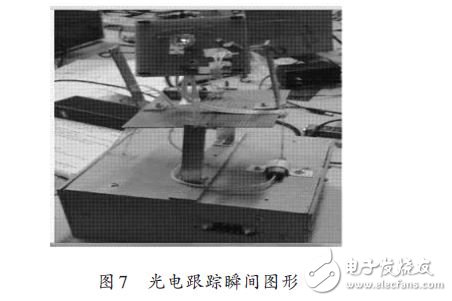
实验中采用波长为650 nm 激光作为目标物,实验过程中先调用目标搜寻程序,大范围搜寻目标,一旦探测到目标,四象限探测器即会有较大电流输出。通过磁性判断转入目标精定位及追踪程序。利用PID 算法配合调节电机转动,使光斑移至四象限光敏面中心。实验结果如图7所示。
本设计采用性能优越的MSP430F169 作为控制核心。使用MSP430内部的A/D模块以及定时器模块能够实现精准的多路数据采集。外围电路的设计,利用RC滤波器,减小了噪声对信号的影响,同时利用相位补偿技术消除了自激干扰,使信号稳定输出。软件编程部分采用位置式PID算式,当达到设定的门限值之后再加入积分运算,这样就能够避免积分饱和问题,使跟踪设备平缓地到达指定位置。
6 结语
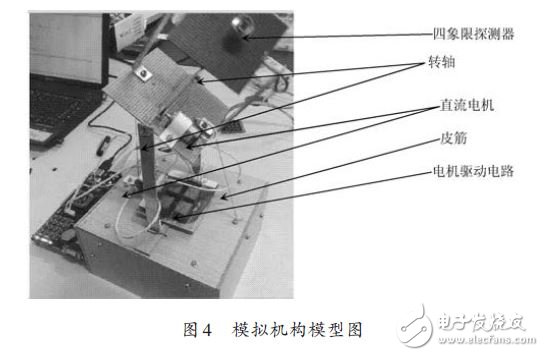
本研究方案中采用性能优越的MSP430F169 作为控制核心。通过四象限光电探测器将光照强度转化成电流信号,经过四象限信号处理电路转化成MSP430F169单片机ADC能够采集到的电压范围,利用PID 算法及相关转化控制两路PWM 波输出控制电机转动,实现目标定位跟踪。通过使用激光器将定位和追踪过程直观显示,便于直接观察。使用MSP430内部A/D 模块和时钟模块能够快速实现精准的PID 误差信号与PWM波占空比的转换。
该研究方案一方面对四象限探测器件以及新式低功耗高集成的微处理器的使用和推广;另一方面探索一种新的机械对准结构设计以及为低成本跟踪系统的研制提供一种可行性方案。
- 基于积分分离PID控制的交流伺服系统(01-31)
- 数控机床工作台位置伺服系统的分析和设计(10-21)
- 液压伺服系统的工作特性及原理(02-11)
- 松下伺服系统基本接线及常见问题解决方法(12-28)
- 方位双稳定转台伺服系统的设计与实现(08-27)
- MSP430单片机在电源控制中的应用(01-09)