激光雷达技术及应用,“微言大义”研讨会带你一探究竟
时间:2017年12月22日(星期五)9:30-17:00地点:深圳会展中心五楼牡丹厅主办方:麦姆斯咨询、创意时代、华强电子网协办方:华强旗舰、上海市物联网行业协会、上海传感信息科技有限公司
活动背景:
先来一张"镇楼图":全球民用激光雷达厂商分布图

激光雷达(Light Detection And Ranging,简称为LiDAR),是军转民的高精度雷达技术。最初的应用主要为军事领域,可提供高分辨率的辐射强度几何图像、距离图像、速度图像,因此受到了各国军事部门的极大关注。激光雷达按有无机械旋转部件分类,包括机械激光雷达和固态激光雷达。机械激光雷达带有控制激光发射角度的旋转部件,而固态激光雷达则依靠电子部件来控制激光发射角度,无需机械旋转部件。按线束数量的多少,激光雷达又可分为单线束激光雷达与多线束激光雷达。顾名思义,单线束激光雷达扫描一次只产生一条扫描线,其所获得的数据为2D数据,因此无法区别有关目标物体的3D信息。多线束激光雷达扫描一次可产生多条扫描线,目前市场上多线束产品包括4线束、8线束、16线束、32线束、64线束等,其细分可分为2.5D激光雷达及3D激光雷达。2.5D激光雷达与3D激光雷达最大的区别在于激光雷达垂直视野的范围,前者垂直视野范围一般不超过10°,而后者可达到30°甚至40°以上。
全球各大产业调研机构都普遍看好激光雷达市场的潜在增长力,未来五年的复合年增长率高达两位数。激光雷达率先放量的领域是扫地机器人,核心原因在于扫地机器人的第一代产品已经非常成熟,拥有了核心的用户市场。随着2016年市场上核心厂商都开始加装激光雷达,扫地机器人领域的激光雷达需求有望率先爆发。其次为无人机、室内服务机器人、增强现实(AR)产品和无人驾驶汽车。

日本软银和法国AldebaranRobotics合作开发的情感交互型机器人Pepper,位于双眼的固定式激光雷达(激光测距仪)用来在行进的过程中测量障碍物和使用者
激光雷达性能精良,也是无人驾驶汽车的核心传感器。通常激光雷达的角分辨率不低于 0.1mard,也就是说可以分辨3km距离上相距0.3m的两个目标,并可同时跟踪多个目标;距离分辨率可达0.1m;速度分辨率能达到10m/s以内。如此高的距离和速度分辨率意味着激光雷达可以利用多普勒成像技术获得非常清晰的图像。激光直线传播、方向性好、光束非常窄,弥散性非常低,因此精度很高。与微波、毫米波雷达易受自然界广泛存在的电磁波影响的情况不同,自然界中能对激光雷达起干扰作用的信号源不多,因此激光雷达抗有源干扰的能力很强。随着无人驾驶技术的成熟,一旦市场形成,有望撬动千亿级美元的市场。
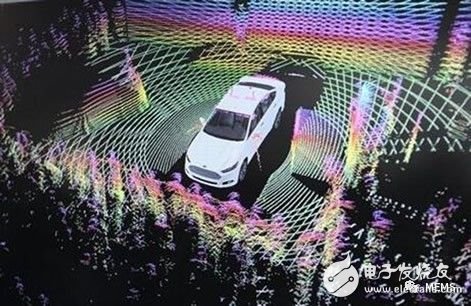
激光雷达在自动驾驶中的应用,形成三维点云数据
目前,全球激光雷达核心元器件有激光器(如固体激光器、半导体激光器、气体激光器等)、扫描器(如扫描镜、旋转电机等)、光电探测器(如硅光电倍增管、雪崩光电二极管、CCD/CIS等)及接收器IC(如放大器、模数转换器、FPGA等)、位置和导航系统(GPS、IMU)。其中,领先的元器件供应商主要集中于欧美地区。

全球激光雷达产业链图
在保证质量的前提下,价格昂贵是制约激光雷达量产和占据市场的主要因素,而MEMS技术在该领域的成熟应用将是主要推动力之一。展望未来,国内外激光雷达的成本、技术发展及应用趋势如何呢?国内是否有望打造激光雷达的蓝海?为此,本次研讨会邀请激光雷达业界精英进行深入交流和探讨,内容涉及激光雷达相关硬件、软件、应用和市场分析等。
已经确认的演讲内容如下:
基于自动驾驶用激光雷达介绍
神秘嘉宾
ToF三维感知芯片与相控阵固态激光雷达的系统优化
炬佑智能 CEO 刘洋
高精度飞行时间(ToF)测量技术在激光雷达中的应用
艾迈斯(ams)高级产品管理与营销经理 黄孙峰
无人驾驶激光雷达现状和展望
禾赛科技 董事长 孙恺
从激光雷达的角度看自动驾驶
速腾聚创 联合创始人兼COO 邱纯潮
镭神-激光雷达汽车辅助驾驶系统
镭神智能 董事长 胡小波
小镜子有大作为-MEMS微振镜助力固态激光雷达更快普及
西安知微传感技术 创始人 夏长锋
滨松半导体器件在高性能激光雷达上的应用
滨松(Hamamatsu)市场推进工程师 张杰
激光雷达技术在航天领域的应用
上海技物所 副研究员 王海伟
嘉宾介绍:
刘洋,拥有丰富业界经验,主要开发和设计信号处理芯片,算法和智能系统包括ToF。开发了50种以上芯片,客户包括苹果、三星和索尼等。曾任职于多家国际公司,任副总等高级技术和市场管理职
激光雷达 相关文章:
- 技术专长:两种激光雷达车用方案(02-26)
- 智能汽车环境感测的三种主流传感器解析(07-02)
- 关于自动驾驶汽车的工作原理、厂商发展现状(11-28)
- 汽车上那些你可能不知道的激光技术(03-19)
- 雷达感测与影像感测完善车载ADAS性能(03-22)
- 无人驾驶黑科技:毫米波雷达穿透力强,激光雷达精度高(09-28)