技术专长:两种激光雷达车用方案
据Lux Research报告,到2030年,激光雷达将在自动驾驶领域收获近亿美元的商业机会。并且按照车企从ADAS向全自动驾驶过渡的商用化计划,激光雷达已经开始在车辆局部发挥特长。用于自动驾驶的传感器中,专业人士对激光雷达的评价是"必不可少"。从最早的谷歌豆荚车到层出不穷的车企测试案例,激光雷达已经逐渐发展为标配。不难发现,随着企业自动驾驶方案的选择和规划,车用激光雷达的商业化正悄然发生。但不同激光雷达企业进入自动驾驶领域的策略各不相同,产品技术也存在差异。激光雷达与自动驾驶作为最佳CP如何走到一起?作为激光雷达的领军企业,Velodyne,Ibeo和Quanergy打开市场有何不同姿势?来看车云菌的调研。
技术专长:用高精度打动自动驾驶
"传感器+高精度地图+云计算"目前被业内认定为"最靠谱的自动驾驶方案"。传感器是自动驾驶汽车的眼睛,用来观察行驶时环境的动态变化。高精度地图为汽车提供全局视野,尤其擅长预告检测范围外的道路情况。云计算保证传感器数据更新上传,让高精度地图始终处于最新版本并下发车辆。
要让自动驾驶系统代替人类驾驶员,头等大事就是在任何时间、任何地点"看清"周围环境。行车环境复杂,汽车没法单靠一种传感器胜任全部工作。本着"谁行谁上"的原则,摄像头、激光雷达、毫米波雷达发挥各自优势,分工完成了全套感知,保证在不同时间气候下,360度范围内检测车道、交通、行人、标志、刹车灯和路障等各类实时信息。在这其中,激光雷达最擅长的部分是障碍探测与障碍追踪。
与雷达原理相似,激光雷达使用的技术是飞行时间(TOF,Time of Flight)。简而言之,就是根据激光遇到障碍后的折返时间,计算目标与自己的相对距离。不过据业内人士介绍,激光光束与声波相比更加聚拢,因此可以准确测量视场中物体轮廓边沿与设备间的相对距离,这些轮廓信息组成所谓的点云并绘制出3D环境地图,精度可达到厘米级别。Ibeo中国销售总监北京欧百拓信息科技发展有限公司CEO剧学铭打了个比方,用激光雷达看世界,效果好比近视戴上了合适的眼镜。
这种精度对上路行驶的全自动驾驶汽车而言,可以更加接近100%安全。Velodyne亚洲区总监翁炜举了一个简单案例,毫米波雷达可以发现路边障碍,但只能"看到"模糊形体。而厘米级精度可以清楚区分出障碍是道牙还是斜坡,自动驾驶汽车断定是斜坡后,就可以做出安全开上车道的决策。当然激光雷达并非万能。剧学铭认为,对于环境颜色信息的区分,激光雷达不够直接、快捷,而这方面正是摄像头的强项。毫米波雷达可以快速获得速度信息,并且在雾天衰减率低,穿透性好,这点与激光雷达相比,是其优势。遇到传感器束手无策的天气,就需要借助高精度地图。翁炜列举了谷歌自动驾驶豆荚车的案例,暴雪覆盖路面的时候,豆荚车就在高精度地图基础上,定位计算马路车道线位置,确定行驶轨迹。
行业标杆:Velodyne 64线激光雷达
如果再深入了解激光雷达如何描绘周围图景,线数、点密度、水平垂直视角、检测距离、扫描频率、精度是几个主要的参数。自动驾驶和激光雷达这对CP组合,就是从Velodyne 64线开始进入大众视线的。2012年5月,谷歌改装版丰田普锐斯自动驾驶汽车在内华达州上路测试,出场时头顶转个不停的Velodyne 64线,很快就成了自动驾驶汽车的标志性特征。与此同时,谷歌对外宣布项目研究目标——实现无人驾驶并且量产。
当时曝光的谷歌专利显示,车顶64线激光雷达的作用是绘制周围环境的动态3D高精度地图。 通过360度的机械旋转,确保全面检测车辆周围的环境图景。该设备在量产车中被保留,最终版原型车在考虑风阻和防护之后进行了重新设计。但实际上这款Velodyne64线是为地图行业而生,所得数据对自动驾驶汽车实时检测而言,存在冗余。我们不妨寻找一个案例进行说明。恰巧Velodyne员工曾经公布了一段64线产品的拆解视频,可以帮助理解。
不同激光雷达的构造存在差别,不过大致由发射系统、接收系统、信息处理等部分组成。拆解后的Velodyne64线如下图所示。从正面看,整个激光收发器可以视为上下两部分,每部分都有三个并排透镜,两侧透镜是激光发射处,中间是接收处。转到产品背后会发现,两侧凸镜后各有16个一组的二极管,中间透镜对应32个接收器,可以把光信号变成电信号。
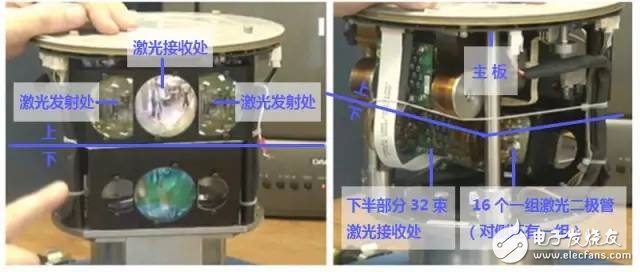
激光光束从两侧透镜发出,遇到障碍物折返后经过中间透镜被抓取,接收器处理分析后判断障碍物位置。所有的时间信息、控制信息、接收信号都会传到顶端的主板上进行信息处理。底部的旋转记录器会
- 智能汽车环境感测的三种主流传感器解析(07-02)
- 关于自动驾驶汽车的工作原理、厂商发展现状(11-28)
- 汽车上那些你可能不知道的激光技术(03-19)
- 雷达感测与影像感测完善车载ADAS性能(03-22)
- 无人驾驶黑科技:毫米波雷达穿透力强,激光雷达精度高(09-28)
- 无人驾驶技术中的激光雷达和摄像头都干些什么?(11-07)