通信终端及雷达系统建模方法及系统仿真案例
维相对位置。
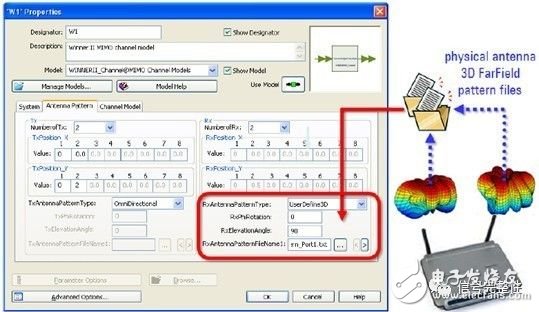
图 2 WINNER信道MIMO天线模型设置
通过导入单纯的手机远场方向图及考虑SAM人头模型的手机方向图,创建两种信道模型,能够比较理想工作场景及实际工作场景下系统容量[3]。通过这种方式,能够将天线真实方向图及天线布局融入到信道模型中,获取天线性能对系统指标的影响。
天线及信道模型不仅能够应用在仿真软件中,还能作为必要测试条件,参与到标准测试中。典型案例是是德科技的辐射两步法(RTS)。
辐射两步法是把 MIMO OTA 的测试分成两步:第一阶段先在暗室对终端进行方向图测量,利用终端的上报功能测出待测件的辐射方向图;第二阶段把在第一阶段中测到的方向图信息加载到信道仿真器中,模拟出包含了待测件天线特性的无线信道。基站模拟器输出的下行信号先和加载了待测件方向图信息的无线信道进行卷积,通过测量天线发射出来,进行接收机的性能测试。
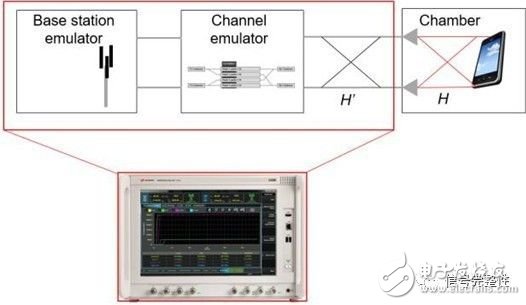
图 3 辐射两步法测试示意
辐射两步法的测量结果和已经成为CTIA MIMO OTA测量标准的多探头方法(MPAC)测量结果的一致性已被 3GPP 认可。在2017年5月份结束的3GPP RAN4 会议上有正式批准的结论[4]。
3 雷达系统中的天线模型
和移动终端的全向天线不同,雷达系统的天线波束宽度一般为几度至十几度。雷达系统工作在搜索、跟踪两种模式时,需要对波束方向进行精确建模[5]。
传统仿真系统中,主要侧重于对雷达系统进行信号流级的仿真,即考虑信号传输路径及信号处理结果,并不考虑天线的方向图及指向性对雷达系统的影响。如VSS中,考虑目标的距离及速度,将收发天线简化为增益模型,仅影响接收机获得的信号电平。在这种系统仿真架构下,天线仅有部分指标(如反射系数、阻抗等)能够和级联的射频系统发生关联。
对于复杂的应用场景,需要考虑动平台(如舰船、飞行器或战车)及天线的位置信息。系统仿真软件SystemVue提供了一个层次化的设计解决方案,即除了信号层面的分析以外,还可将相控阵雷达系统所处的动平台的位置(如地心惯性坐标系)和速度信息、天线的位置信息等纳入一并进行分析。这个平台中,可以进行多目标、多站雷达的设定,也能够进行多天线设定。
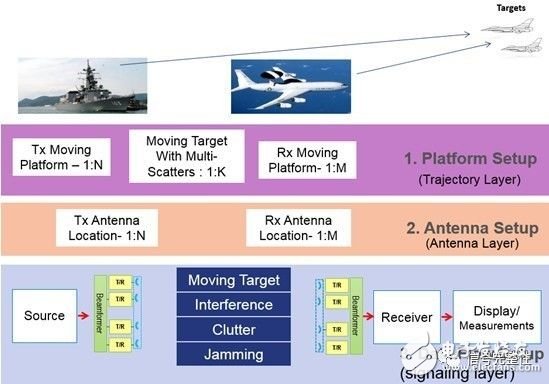
图 4 雷达系统三层仿真设置示意
在信号层中,设置天线的工作模式(搜索或者跟踪)、天线方向图等基本指标;在天线层中,设置雷达目标位置,以及雷达平台的侧倾角、俯仰角、偏航角,天线在雷达平台中侧倾角、俯仰角、偏航角;在轨迹层中,分别设置雷达收发平台及目标的位置(经度、维度、高度)、指向、速度、加速度、运动轨迹等信息。通过在不同坐标系下进行转换,将天线的方向图及雷达平台、目标的运动轨迹等信息进行综合考虑。
可以以EW接收机测试的示例,来说明雷达的复杂应用场景。在场景中,EW接收机(EW Rx)用于监视空间中的四个雷达站。EW接收机的任务是检测所有这些信号、识别每个信号,并对每个雷达站的位置、速度、时间波形和频率内容进行整理。
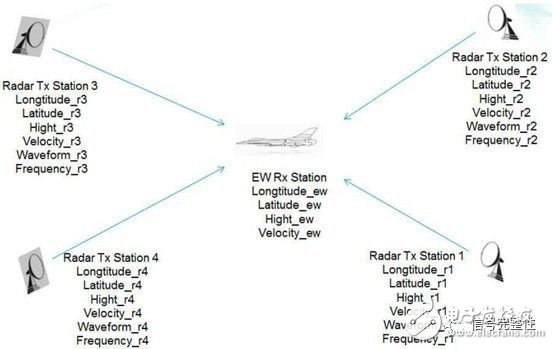
图 5 EW接收机测试场景
为了测试EW接收机,必须产生测试信号,这并不意味着简单的将多个时间波形进行叠加。由于EW接收机可能安装在飞机、汽车或军舰上,用于生成该测试信号的工具必须允许用户指定EW Rx站的位置、速度、运动轨迹等。此外,对于每个雷达站,工具必须允许用户指定其位置、速度、时间波形、频率、天线工作模式等[6]。
如果需要对环境进行精确建模,信号层仿真软件Simulink、SystemVue等就不能胜任了。使用专业的场景仿真软件,如STK等,对目标姿态、环境进行建模,能够获得较为真实的目标特性。
如图6中,使用SystemVue产生线性调频脉冲信号源,并经过射频发射路径加入射频器件的非线性、噪声等因素,时域信号通过接口进入STK软件。STK中预先定义外场地形地貌以及飞机运动轨迹、飞行姿态等指标。雷达处于跟踪模式,尽量将波束照射到飞机上,而飞机则做出各种机动动作来规避雷达探测。整个场景的时域信号会返回到SystemVue软件中,通过后处理程序来获得雷达的检测概率。
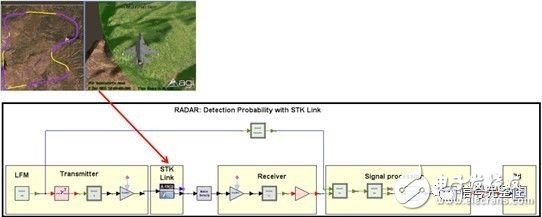
图 6 STK联合仿真示意图
4 结论
可见,在通信或雷达系统中,天线都不再以独立的姿态出现,而和通信信道、雷达使用场景等紧密结合,共同作用。天线设计师及通信/雷达系统设计师如果能够利用已有商业软件及成熟理论,将天线的特性融入到系统设计中,能够大幅度降低联调风险,加快产品设计速度。
- 移动通信3G技术介绍(10-27)
- 实现移动通信网络监控系统的设计论述(05-24)
- 移动通信中Java智能卡RMI技术的开发(09-10)
- DSP技术在移动通信中的应用(09-18)
- 移动通信网络云计算的设计(09-20)
- 意法半导体:移动通信机器人应用方案(02-15)