意法半导体:移动通信机器人应用方案
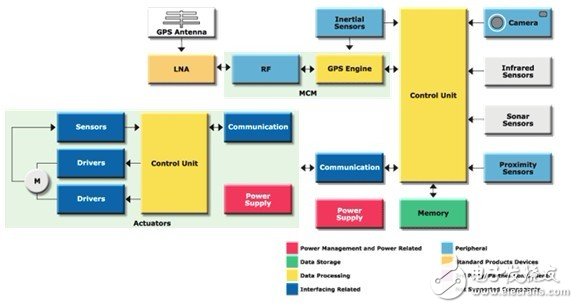
移动机器人学是工程学的一个分支,利用电子、控制系统、机电一体化、人工智能、计算机科学和生物工程来开发移动机器人系统。一个机器人是一种包含传感器、致动器和控制系统的器件。 服务机器人或移动机器人的首要任务是能够在其工作环境内四处移动。
主要智能产品为:-
基于ARM Cortex M4内核的32位微控制器
用于驱动电磁阀、DC电机和步进电机的 标准低端、高端和桥接智能电源器件
致动器驱动、充电和电源管理专用IC
业内最广泛的功率MOSFET和IGBT
交流/直流低压电池管理单元
移动机器人一般采用电池供电。 太阳能电池或其他无线供电方式的机器人在商品化解决方案或机器人文献中不多见。 自主机器人拥有广泛市场,包括高级电动玩具和专门用于恶劣环境下进行探测的机器人。 我们还将在最近推出目前正在研发的协作式微型机器人。这些采用电池工作的自主机器人具有多种优点:电池具有安全、经济、便于使用和标准化的特点。 最好选用可充电电池组,即使成本比较高。 目前,有大量采用可充电电池组的机器人,如用于清洁房间的机器人。这些机器人需要定期在电源基座上为电池充电,然后才能继续工作。 意法半导体拥有各种器件和解决方案支持电源管理和DC-DC转换。 配合大量技术文档和评估板,有助于开发人员加快设计速度。 同时,提供用于电池管理的电压和电流控制器,以及各种DC-DC转换器件和解决方案,如多路输出稳压器、步升和步降转换器、微处理机控制器和复位IC。 这些只是增强自主机器人电池使用寿命的部分解决方案。

交流/直流高压电池管理单元
移动机器人一般采用电池供电。 太阳能电池或其他无线供电方式的机器人在商品化解决方案或机器人文献中不多见。 自主机器人拥有广泛市场,包括高级电动玩具和专门用于恶劣环境下进行探测的机器人。 这些自动或半自动机器人相当于电动工具,电池通过AC-DC转换器由电源充电。 因此,电源转换器成为这些平台的通用部件。意法半导体提供大量电源转换器及相关技术文档和评估板,有助于加快开发人员的设计速度。

导航和控制器
移动机器人导航涉及大量不同的技术和应用。 自主导航往往被认为纯科幻,但实际上只不过是一个由具体要求和解决方案组成的问题。
全局导航,即机器人能够确定其绝对位置或在图示路径中的位置,移动到指定目的点。
局部导航,即机器人能够确定其与环境中 (固定或运动) 物体的相对位置,与它们正确交互。
个人导航,即机器人知道移动物体构成的各个部分及其彼此相互之间的位置关系。
ST为包括用于航位推算的惯性传感器、户外导航GPS或物体识别摄像机在内的高级导航系统提供先进的技术和产品。
步进电机执行器
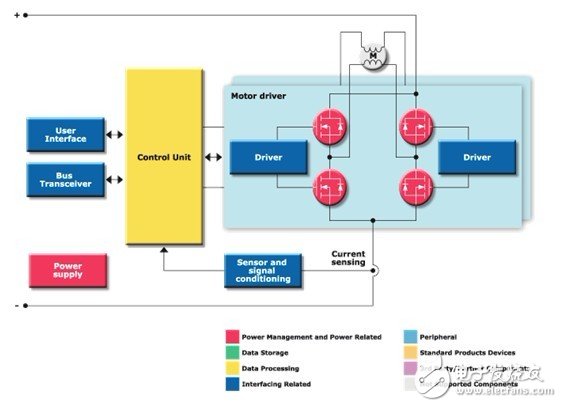
电机控制是机器人最重要的问题之一。 移动机器人一般需要电机进行两种控制:一个与机器人行走机构相关,另一个与机器人本身末端执行机构的运动相关。
末端执行机构的运动可通过两相双极步进电机来管理。 这种同步电机最低到最高转速可分多次步进。 电机位置可精确控制,不需要反馈机构。 这样便于机器人开发人员集中精力编写电机正转和反转最先进的算法。
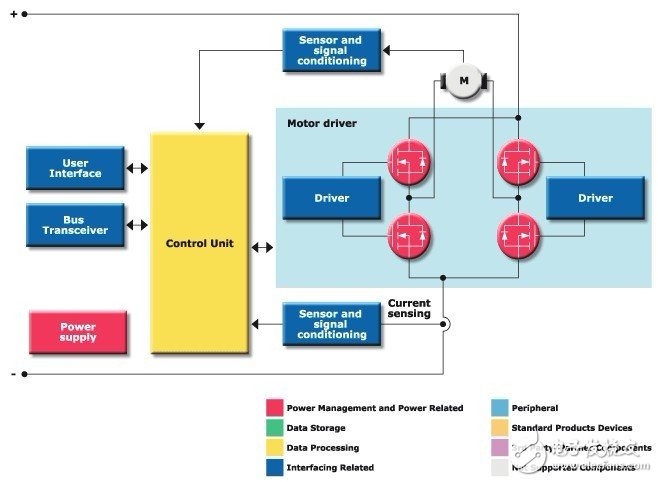
直流电机执行器
电机控制是机器人最重要的问题之一。 移动机器人一般需要电机进行两种控制:一个与机器人行走机构相关,另一个与机器人本身末端执行机构的运动相关。 机器人行走机构必须能够使机器人在结构化或非结构化环境中移动。 这一般通过简单的直流 (DC) 电机来实现,电机转速与电压成正比,扭矩与电流成正比。 全桥转换器可控制电机正反转旋转。
- 意法半导体:混合动力及电动汽车解决方案(02-02)
- 立足整个信号链需求 意法半导体音频解决方案(02-07)
- 意法半导体数字电视和机顶盒解决方案(02-07)
- 意法半导体:三相电机控制解决方案(02-25)
- 意法半导体:工厂自动化解决方案(02-15)
- 意法半导体:工业机器人控制应用方案(02-15)