激光雷达(LiDAR)——参数才是决定激光光源选择的因素
据ABI Research最近的一项调查显示,到2026年1月,汽车上的LiDAR设备数量将达到6900万部。正如Keopsys集团(拉尼翁,法国)的Frederic Chiquet、研发经理Guillaume Canat和首席执行官Marc le Flohic所解释的那样,现存两类主要的自动驾驶汽车LiDAR系统:3D Flash LiDAR和扫描式LiDAR。Flash LiDAR使用的是广角发射源和广角光学系统(例如鱼眼镜头),将在单个发射过程中获得的反散射光集中于矩阵探测器上,以获得用于模拟车辆周围区域的所有飞行时间(ToF)数据。相反地,扫描式LiDAR可以逐行地处理3D环境;光在每个方向上依次发射,对应的回声由探测器逐个检测。符合用眼安全的激光源必须以脉冲模式工作,光束需强大到能够探测到100米外穿深色衣服的行人,工作温度为-40到85°C,并且可发射出测距精度达10厘米的脉冲。许多LiDAR光源是基于激光二极管,也有非制冷光纤激光器,较激光二极管有诸多的优势,如拥有高功率光束分裂和使用光纤路由到多个传感器位置的能力。使用主振荡器功率放大器(MOPA)结构中,一种典型的1550 nm LiDAR的光纤激光器的脉冲重复率达到5~250 kHz,功率水平分别为10~15 kW和200~300 W。脉冲激光二极管和光纤激光源用于自动驾驶汽车LiDAR的应用对比研究如下。
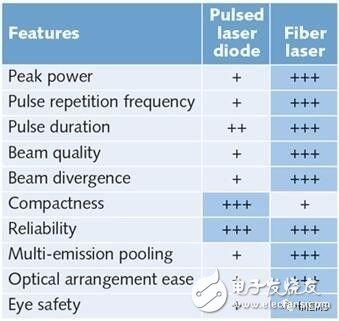
自动驾驶车辆LiDAR应用中脉冲激光二极管和光纤激光器来源的比较(来源:Keopsys集团)专用于自动驾驶汽车的脉冲激光二极管是混合器件。激光芯片安装在由MOSFET晶体管触发的电容器中。每当晶体管的栅极开启时,电容器内积累的电荷就会被释放到芯片中,从而释放出光脉冲。尽管此类型光源的性价比不错,相比昂贵的1550nm InGaAs光电二极管,其905 nm的输出很容易被硅探测器检测到,但激光二极管具有有限的脉冲重复率和较低的峰值功率,并且受到过热效应的限制。3D Flash LiDAR的激光二极管光源是基于二极管堆叠技术,用几个边缘发射器垂直封装在一起,每层之间均由一层薄的散热片隔开以防内部过热。不幸的是,非相干堆叠增加会导致输出功率高,这样通常不能满足1类用眼安全的需求。尽管VCSEL是一种比叠加技术性价比更高的替代方案,但其较弱的输出功率将其限制在短程ToF的应用中。
激光雷达 相关文章:
- 技术专长:两种激光雷达车用方案(02-26)
- 智能汽车环境感测的三种主流传感器解析(07-02)
- 关于自动驾驶汽车的工作原理、厂商发展现状(11-28)
- 汽车上那些你可能不知道的激光技术(03-19)
- 雷达感测与影像感测完善车载ADAS性能(03-22)
- 无人驾驶黑科技:毫米波雷达穿透力强,激光雷达精度高(09-28)