Mosfet驱动电路开发进阶之路
比起钢铁侠以心脏为核心驱动飞跃
你要怎么起飞呢?
学好驱动知识
You are hero
"常见的MOS管驱动方式有非隔离的直接驱动、自举驱动,和有隔离的变压器驱动、光耦隔离驱动等。在常用的开关电源拓扑结构中,像Buck、全桥、半桥等,采用NMOS作为开关管,其中有的管子S端不接地,电位随着MOS管的导通状态而变化,而驱动MOS管的栅极信号是基于S端电位的,MOS管的开启电压在4.5V左右,为了保证管子完全打开,一般驱动电压要大于10V,取12-15V左右为宜。所以要保证MOS管能正常工作,G极电压要随S端电位变化而时刻变化,且GS间电压要能达到稳定的12V。
若采用直接驱动方式,电平是基于电路的地,当S端电位一抬高,G端电位不变,MOS管无法正常工作;这时可以选择一个电容,负端接在S端,正端保持一个12V稳定电源,通过这个电容给G端充电,则可以实现GS端有个稳定的12V电压。这就好比水位,电容是个水缸,飘在河上,S端电位好比河水的水位,电路的地好比海平面,一般都以海平面为基准,河水水位随天气变化会有高低变化,而水缸的水位不管河水如何变化,它与河水的水位高度差始终不变。这种驱动方式就叫做自举驱动,储能的电容称为自举电容,S端电位可称作"悬浮地"。如下图1所示,其中C5为自举电容,一般取几uF到100uF之间。

但图1所示电路是不完整的,通过自举电容给前面驱动供电,但是谁给自举电容充电呢?假设电路正常工作,只有两个位置电压比较稳定,一个是输入电压30V,一个输出电压12V。若长期用输入电源充电,有18V(30-12)压差,若采用限流电阻大,则30V经过限流电阻给电容充电速度慢,电流小不足以启动驱动部分;选择限流电阻小,损耗很大,而输出电压12V与自举电容所需电压一致,且在电路正常工作时,能提供较大的充电电流维持自举电容电压稳定。
输出电压能直接接到自举电容上吗?答案是否定的,分析电路工作过程,当MOS管关闭期间,由于二极管的钳位作用,S端电位位-0.7V,则G端电位小于等于11.3V,这样输出可以对自举电容实现充电;当MOS导通,S端电位近似为30V,此时G端电位大于输出电压,如果直接相连的话就会出现自举电容对输出充电,很快会放完,导致下个周期无法启动驱动,这是不被允许的,所以充电有方向,这里需要接一个快恢二极管。
接下来再分析电路工作过程:当电源一上电,会发现电路无法启动,因为自举电容没有电压,没有驱动就没有输出,所以开机时需要输入电源先给自举电容充电,当充至12V时再给前面驱动电路供电。由于有18V的压差,为减小损耗,这里可以选择一个20k左右的限流电阻,这样给自举电容大约1mA左右的小电流缓慢充电,这样做的另一个好处就是实现了电路的软启动,减小应力。但是充电电流只有1mA,前面有三角波发生器、电平可调电路以及驱动电路所需电流至少有几十mA,直接充会发现永远充不满自举电容,因为充电电流不够,这时可以设计这么一个开关,当第一次上电时,30V输入电源以1mA电流给自举电容充电,此时这个开关关闭,不给后面电路供电,当自举电容的电压充至12V时,才打开开关,自举电容给驱动供电,使电路有一定的输出,输出电压又给自举电容及时补充能量,使其能正常工作。所以这个开关的目的是第一次上电使电容充电至12V,之后便一直处于开通状态即可。
沿着这个思路,首先选择开关管,由于是接在电源端,所以这里选择P管,要想充到12V左右导通,可以选择一个11V的稳压二极管串在b和地之间。为了限流,加一个限流电阻。但是由于存在着这个稳压二极管,当自举电容的电压稍有降低,比如降到11V,则开关管就关断了,而输出电压升到12V需要一段时间,没有达到比自举电容高的电位,就无法给自举电容充电,电路就无法继续工作。而造成这个的关键就是11V的稳压二极管,如果当开关打开后,就把这个二极管短路,那么就可以解决这个问题,所以这里也需要一个开关,而且是短接到地,选择N管,具体如图2所示。图中Q5为PNP,Q4为NPN,开机一上电,Q5关闭,30V经过R5给C5充电,充至12V左右,Q5导通,则其集电极电位达到11.3V,利用这点电位,去驱动Q4导通,这样就可以实现Q4短路D4,这样即使自举电容降低到6V依然可以使Q5导通,继续输出电流维持驱动电路工作,从而带动整个电路工作。
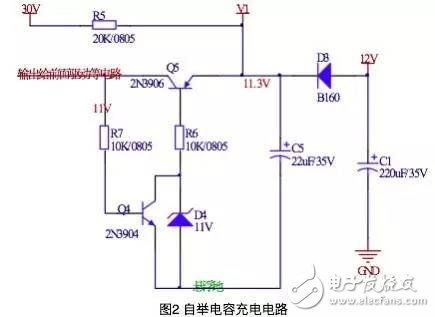
图2 自举电容充电电路
至此,Buck电路的自举驱动电路部分就设计完成了。自举驱动由
- 凌力尔特大功率多相同步升压型DC/DC控制器LTC3787(10-15)
- 一种200V/100A VDMOS 器件开发(02-23)
- 电动自行车控制器MOSFET驱动电路的设计(11-18)
- 两种常见的MOSFET驱动电路设计(12-02)
- 集成MOSFET 的分立器件方案(01-30)
- 功率MOSFET的锂电池保护电路设计(04-18)