stm32定时器输入捕获
,我们后面会用到,同时对于其他三个通道也有一个类似的函数, 使用的时候一定要分清楚使用的是哪个通道该调用哪个函数,格式为 TIM_OCxPolarityConfig()。 参数 TIM_ICSelection 是用来设置映射关系,我们配置 IC1 直接映射在 TI1 上,选择 TIM_ICSelection_DirectTI。
参数 TIM_ICPrescaler 用来设置输入捕获分频系数,我们这里不分频,所以选中 TIM_ICPSC_div1,还有 2,4,8 分频可选。
参数 TIM_ICFilter 设置滤波器长度,这里我们不使用滤波器,所以设置为 0。 配置代码是:
TIM_ICInitTypeDef TIM5_ICInitStructure;
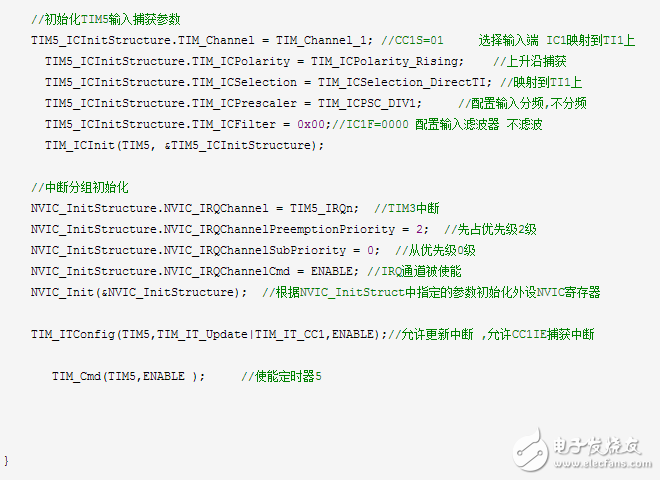
TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; //选择输入端 IC1 映射到
TI1 上 TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到
TI1 上 TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_div1; //配置输入分频,不分频
TIM5_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波
TIM_ICInit(TIM5, &TIM5_ICInitStructure);
4)使能捕获和更新中断(设置 TIM5 的 DIER 寄存器)
因为我们要捕获的是高电平信号的脉宽,所以,第一次捕获是上升沿,第二次捕获时下降沿,必须在捕获上升沿之后,设置捕获边沿为下降沿,同时,如果脉宽比较长,那么定时器就
会溢出,对溢出必须做处理,否则结果就不准了。这两件事,我们都在中断里面做,所以必须
开启捕获中断和更新中断。
这里我们使用定时器的开中断函数 TIM_ITConfig 即可使能捕获和更新中断: 允许更新中断和捕获中断
TIM_ITConfig(TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE);
5)设置中断分组,编写中断服务函数
设置中断分组的方法我们不做讲解,主要是通过函数 NVIC_Init()来完成。分组完成后,我们还需要在中断函数里面完成数据处理和捕获设置等关键操作,从而实现高电平脉宽统计。在中断服务函数里面,跟以前的外部中断和定时器中断实验中一样,我们在 中断开始的时候要进行中断类型判断,在中断结束的时候要清除中断标志位。使用到的函数在 上面的实验已经讲解过,分别为 TIM_GetITStatus()函数和 TIM_ClearITPendingBit()函数。
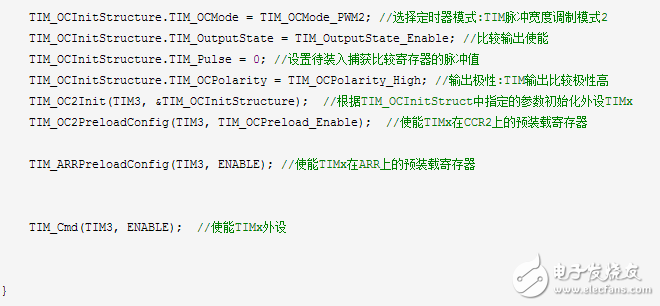
6)使能定时器(设置 TIM5 的 CR1 寄存器)
最后,必须打开定时器的计数器开关, 启动 TIM5 的计数器,开始输入捕获。 使能定时器 6 步设置,定时器 5 的通道 1 就可以开始输入捕获了。
TIM_Cmd(TIM5,ENABLE);
本实验用到的硬件资源有:
1) 指示灯 DS0
2) WK_UP 按键
3) 串口
4) 定时器 TIM3
5) 定时器 TIM5
我们将捕获 TIM5_CH1(PA0)上的高电平脉宽,通过 WK_UP 按键输入高电平,并从串口打印高电平脉宽。同时我们保留上节的 PWM 输 出,通过用杜邦线连接 PB5 和 PA0,来测量 PWM 输出的高电平脉宽。
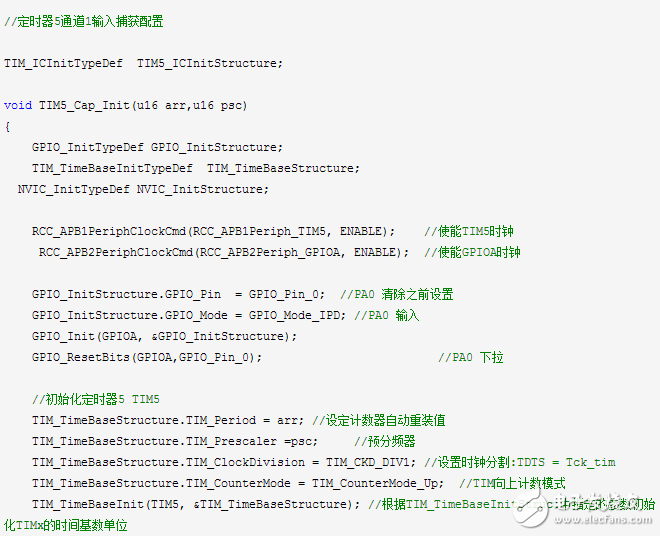
timer.h 文件:
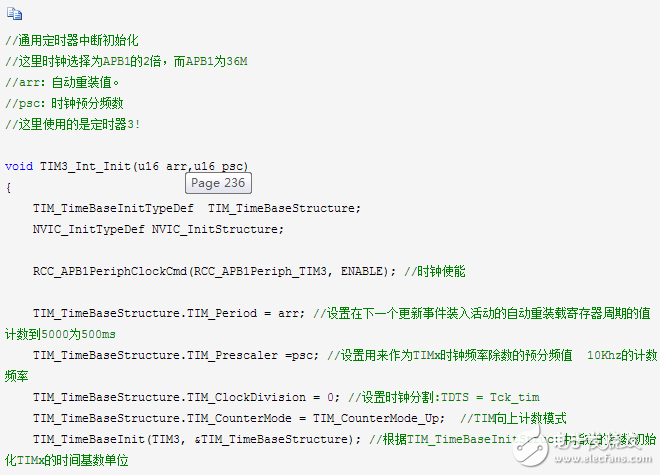
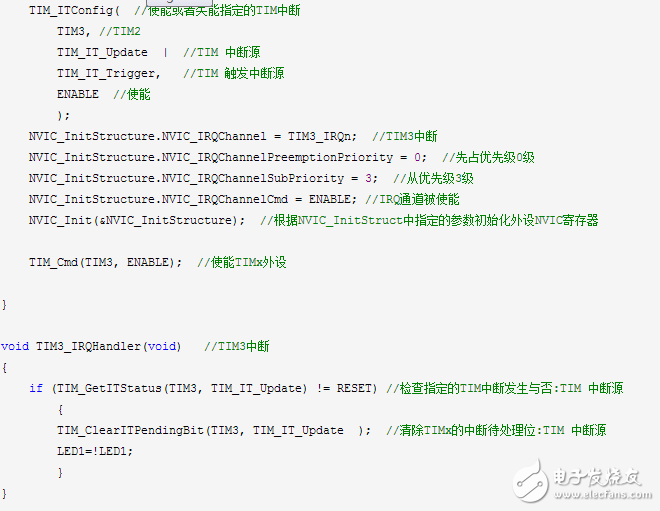
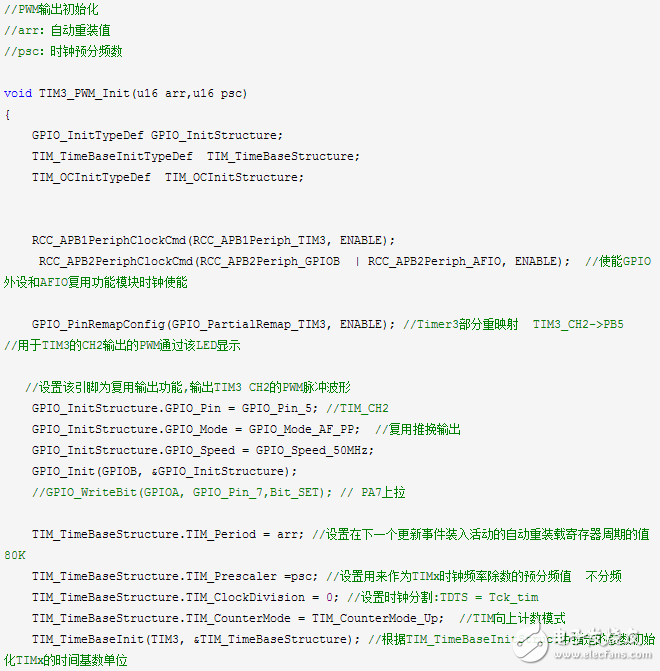
timer.c 文件:
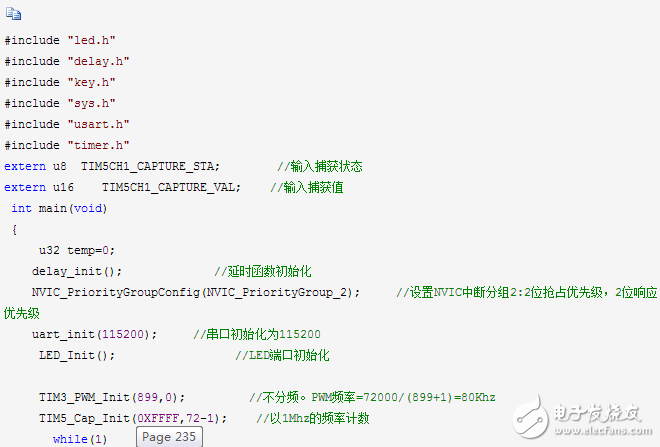
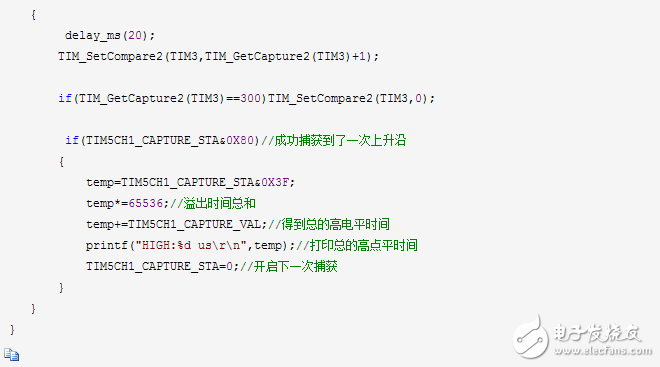
main.c文件:
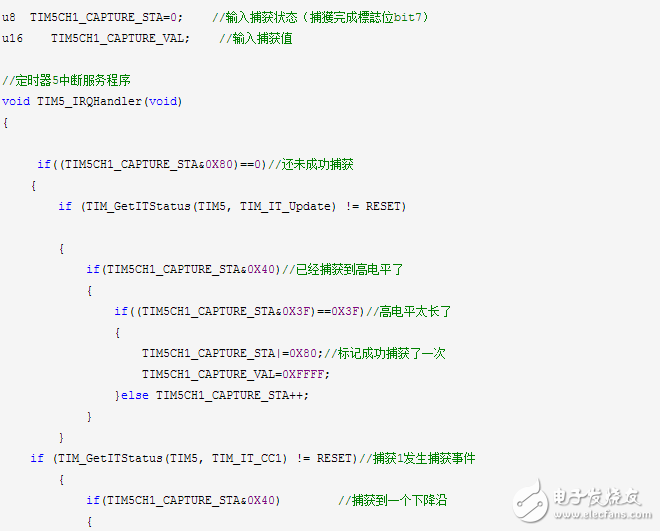
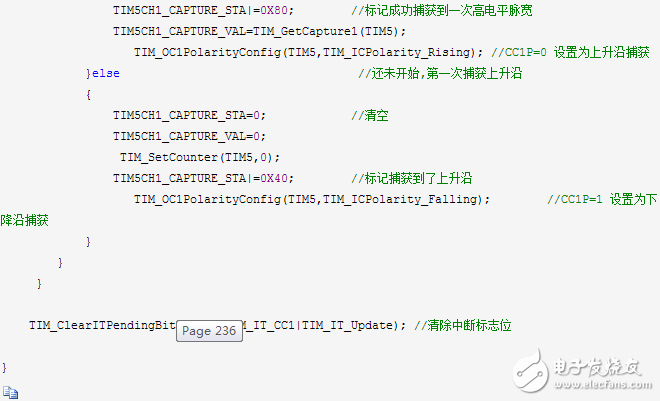
TIM5_IRQHandler 是 TIM5 的中断服务函数,该函数用到了两个全局变量,用于辅助实现 高电平捕获。其中 TIM5CH1_CAPTURE_STA,是用来记录捕获状态,该变量类似我们在 usart.c 里面自行定义的 USART_RX_STA 寄存器(其实就是个变量,只是我们把它当成一个寄存器那样 来使用)。另外一个变量 TIM5CH1_CAPTURE_VAL,则用来记录捕获到下降沿的时候,TIM5_CNT的值。
现在我们来介绍一下,捕获高电平脉宽的思路:首先,设置 TIM5_CH1 捕获上升沿,这在TIM5_Cap_Init 函数执行的时候就设置好了,然后等待上升沿中断到来,当捕获到上升沿中断, 此时如果 TIM5CH1_CAPTURE_STA 的第 6 位为 0,则表示还没有捕获到新的上升沿,就先把 TIM5CH1_CAPTURE_STA、TIM5CH1_CAPTURE_VAL 和 TIM5-》CNT 等清零,然后再设置TIM5CH1_CAPTURE_STA 的第 6 位为 1,标记捕获到高电平,最后设置为下降沿捕获,等待 下降沿到来。如果等待下降沿到来期间,定时器发生了溢出,就在 TIM5CH1_CAPTURE_STA 里面对溢出次数进行计数,当最大溢出次数来到的时候,就强制标记捕获完成(虽然此时还没 有捕获到下降沿)。当下降沿到来的时候,先设置 TIM5CH1_CAPTURE_STA 的第 7 位为 1,标 记成功捕获一次高电平,然后读取此时的定时器值到 TIM5CH1_CAPTURE_VAL 里面,最后设置为上升沿捕获,回到初始状态。这样,我们就完成一次高电平捕获了,只要 TIM5CH1_CAPTUR
- 盘点STM32-NUCLEO开发与仿真平台(03-28)
- 一种基于ZigBee和STM32的室内智能照明系统的设计(05-13)
- 大联大友尚集团推出ST STM32马达控制Nucleo开发工具包,可直接开始运转无刷直流马达(05-27)
- 这些VR设备“内脏”构造大解剖!绝对有你没见过的(02-14)
- 在变频空调风机中永磁同步电机矢量控制方案的运用(04-04)
- 基于STM32和SIM900A的无线通信模块设计(10-07)