计算机是怎么知道两张图片相似的呢?
很多搜索引擎可以用一张图片,搜索互联网上所有与它相似的图片。你输入网片的网址,或者直接上传图片,Google就会找出与其相似的图片。下面这张图片是美国女演员Alyson Hannigan。

上传后,Google返回如下结果:

类似的"相似图片搜索引擎"还有不少,TInEye甚至可以找出照片的拍摄背景。

===================================================
这种技术的原理是什么?计算机怎么知道两张图片相似呢?
根据Neal Krawetz博士的解释,原理非常简单易懂。我们可以用一个快速算法,就达到基本的效果。
这里的关键技术叫做"感知哈希算法"(Perceptual hash algorithm),它的作用是对每张图片生成一个"指纹"(fingerprint)字符串,然后比较不同图片的指纹。结果越接近,就说明图片越相似。
下面是一个最简单的实现:
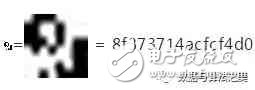
第一步,缩小尺寸。
将图片缩小到8&TImes;8的尺寸,总共64个像素。这一步的作用是去除图片的细节,只保留结构、明暗等基本信息,摒弃不同尺寸、比例带来的图片差异。

第二步,简化色彩。
将缩小后的图片,转为64级灰度。也就是说,所有像素点总共只有64种颜色。
第三步,计算平均值。
计算所有64个像素的灰度平均值。
第四步,比较像素的灰度。
将每个像素的灰度,与平均值进行比较。大于或等于平均值,记为1;小于平均值,记为0。
第五步,计算哈希值。
将上一步的比较结果,组合在一起,就构成了一个64位的整数,这就是这张图片的指纹。组合的次序并不重要,只要保证所有图片都采用同样次序就行了。
得到指纹以后,就可以对比不同的图片,看看64位中有多少位是不一样的。在理论上,这等同于计算"汉明距离"(Hamming distance)。如果不相同的数据位不超过5,就说明两张图片很相似;如果大于10,就说明这是两张不同的图片。
具体的代码实现,可以参见Wote用python语言写的imgHash.py。代码很短,只有53行。使用的时候,第一个参数是基准图片,第二个参数是用来比较的其他图片所在的目录,返回结果是两张图片之间不相同的数据位数量(汉明距离)。
这种算法的优点是简单快速,不受图片大小缩放的影响,缺点是图片的内容不能变更。如果在图片上加几个文字,它就认不出来了。所以,它的最佳用途是根据缩略图,找出原图。
实际应用中,往往采用更强大的pHash算法和SIFT算法,它们能够识别图片的变形。只要变形程度不超过25%,它们就能匹配原图。这些算法虽然更复杂,但是原理与上面的简便算法是一样的,就是先将图片转化成Hash字符串,然后再进行比较。
昨天,我在isnowfy的网站看到,还有其他两种方法也很简单,这里做一些笔记。

一、颜色分布法
每张图片都可以生成颜色分布的直方图(color histogram)。如果两张图片的直方图很接近,就可以认为它们很相似。
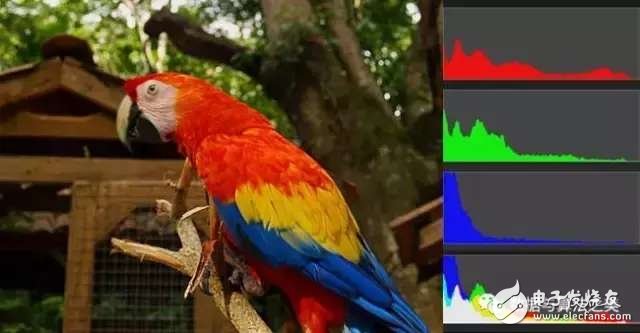
任何一种颜色都是由红绿蓝三原色(RGB)构成的,所以上图共有4张直方图(三原色直方图 + 最后合成的直方图)。
如果每种原色都可以取256个值,那么整个颜色空间共有1600万种颜色(256的三次方)。针对这1600万种颜色比较直方图,计算量实在太大了,因此需要采用简化方法。可以将0~255分成四个区:0~63为第0区,64~127为第1区,128~191为第2区,192~255为第3区。这意味着红绿蓝分别有4个区,总共可以构成64种组合(4的3次方)。
任何一种颜色必然属于这64种组合中的一种,这样就可以统计每一种组合包含的像素数量。
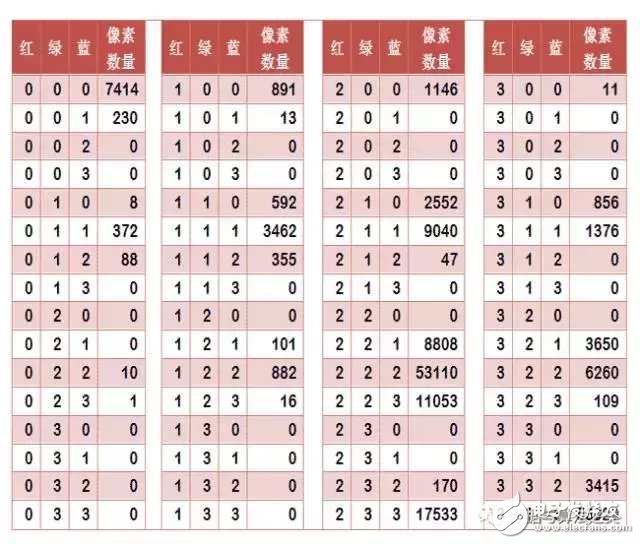
上图是某张图片的颜色分布表,将表中最后一栏提取出来,组成一个64维向量(7414, 230, 0, 0, 8, …, 109, 0, 0, 3415, 53929)。这个向量就是这张图片的特征值或者叫"指纹"。
于是,寻找相似图片就变成了找出与其最相似的向量。这可以用皮尔逊相关系数或者余弦相似度算出。
二、内容特征法
除了颜色构成,还可以从比较图片内容的相似性入手。
首先,将原图转成一张较小的灰度图片,假定为50&TImes;50像素。然后,确定一个阈值,将灰度图片转成黑白图片。

如果两张图片很相似,它们的黑白轮廓应该是相近的。于是,问题就变成了,第一步如何确定一个合理的阈值,正确呈现照片中的轮廓?
显然,前景色与背景色反差越大,轮廓就越明显。这意味着,如果我们找到一个值,可以使得前景色和背景色各自的"类内差异最小"(minimizing the intra-class variance),或者"类间差异最大"(maximizing the inter-class variance),那么这个值就是理想的阈值。
1979年
计算机 相关文章:
- 计算机机房照明标准及相关设计方案(09-03)
- 采用航空插头的SMP运动控制内核机器人控制系统(07-04)
- 计算机视觉新时代,硬件性能极限考验如何破?(07-11)
- 计算机labview对示波器的远程控制技术分析(06-26)
- 意法半导体:计算机主板和笔记本主板方案(02-03)
- 一文读懂计算机视觉和机器人视觉(10-16)