解读ATmega32机器人系统电子电路
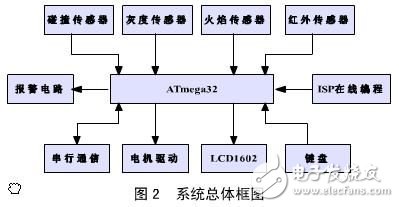
系统以ATmega32单片机为核心,它是一种基于增强RISC结构的、低功耗的8位单片机。其特点为:①片内具有32K字节的可编程 Flash;2K字节的片内SRAM数据存储器;1024个字节片内在线可编程EEPROM数据存储器。②片内含JTAG接口。③外围接口。两个带有分别独立、可设置预分频器的8位定时器/计数器;一个16位定时器/计数器;四个通道的PWM输出;8路10位ADC;32个可编程的I/O口。④低功耗,最高工作频率为16MHz。根据灭火比赛的规则要求,配以碰撞传感器、灰度传感器、火焰传感器和红外传感器。通过两路PWM控制两只电机以驱动灭火机器人,另外一路灭火电机由I/O口通过光电耦合器直接驱动。
系统电源部分
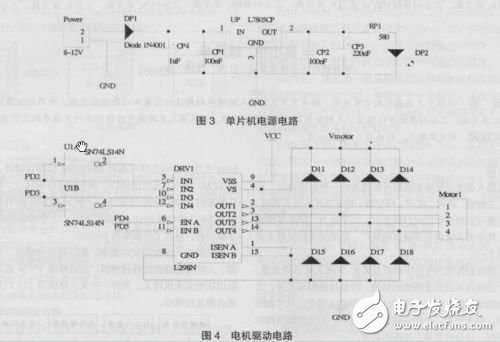
系统采用单电源供电电路时比较简单,但是考虑到电动机起动瞬间电流很大,会造成电源电压不稳,影响单片机和输入电路工作的稳定性和可靠性,因此采用双电源供电方案。将电机电源和单片机电源完全隔离。单片机以及传感器电路使用8V供电,电动机使用12V供电。提高电动机的供电电压,可以提高机器人的运行速度,从而可以提高灭火的成绩。
电机驱动部分
机器人需要控制在一个合适的速度行驶,在灭火的过程中既要以较快的速度找到火源,又要防止因为碰撞而影响比赛的成绩。小车的速度是由两只直流电机控制。 L298驱动芯片是性能优越的小型直流电机驱动芯片之一。它可被用来驱动两个直流电机或者是双极性步进电机。在6—46V的电压下,可以提供2A的额定电流。L298还有过热自动关断功能,并有反馈电流检测功能。为保证L298正常工作,建议加装片外续流二极管。由ATmega32单片机直接输出两路 PWM驱动L298N。改变PWM调制脉冲占空比,可以实现精确调速。脉冲频率对电机转速有影响,脉冲频率高连续性好,但带负载能力差;脉冲频率低则反之。通过PD2和PD3两根I/O口线来控制电机的转动方向。
传感器部分
灭火比赛需要机器人在尽量不碰撞墙壁的基础上尽可能快地找到蜡烛并将火灭掉。在完成任务的过程中首先需要不碰撞墙壁,然后需要判断前方是否有火焰。在找到火焰后需要判断蜡烛旁边的白线。如果碰撞墙壁的话,需要机器人能检测出来并进行处理,不然就会发生机器人卡死的情况,那就不能完成任何任务。
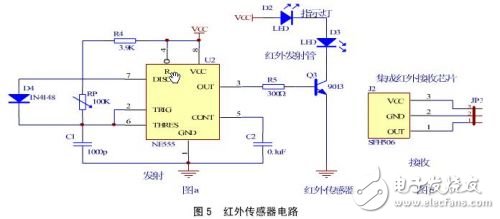
图5所示为红外传感器的发射和接收电路。红外射管采用脉宽调制(PWM)驱动,工作在38KHz的频率下,减少发射电路的功耗。脉冲发生器由NE555构成,通过外部的电位器R1来调节占空比和脉冲频率,由于红外肉眼不可见,所以电路中加入一个LED指示灯来指示红外发射管是否在工作。该 LED和红外发射管串联,当红外发射管正常工作时,该LED灯会点亮。接收电路采用西门子公司生产的红外专用集成接收芯片SFH506-38,它只有接收到38KHZ的脉冲波时才会作用。它内部集成了选项、滤波、放大电路,对外只有3个引脚:①脚为信号输出端;②脚为接地端;③脚为电源端,所以使用起来非常方便,效果比较理想。
灰度传感器是模拟传感器,有一只发光二极管和一只光敏电阻,安装在同一面上。灰度传感器利用不同颜色的检测面对光的反射程度不同,光敏电阻对不同检测面返回的光其阻值也不同的原理进行颜色深浅检测。
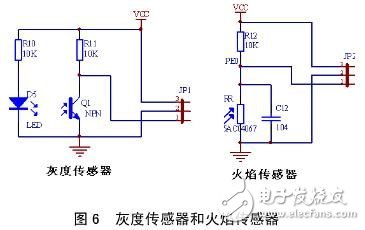
火焰传感器是模拟传感器。它利用红外敏感型元件对红外信号强度的检测并将其转换为机器人可以识别的信号,从而来检测火焰信号。火焰传感器可以用来探测波长在700nm~1000nm范围内的红外线,探测角度为60º;,其中红外线波长在880nm附近时,其灵敏度达到最大。碰撞传感器使用碰撞开关,通过I/O口可直接作为数字量输入。
LCD显示及其它电路
液晶显示器以其微功耗、体积小、显示内容丰富、超薄轻巧的诸多优点,在袖珍式仪表和低功耗应用系统中得到越来越广泛的应用。这里采用2行16个字的DM-162液晶模块,通过与单片机连接、编程,完成显示功能。

本系统中采用了US-100超声波测距模块,可实现2cm~4.5m的非接触测距功能,拥有2.4~5.5V的宽电压输入范围,静态功耗低于2mA,自带温度传感器对测距结果进行校正,同时具有GPIO,串口等多种通信方式,内带看门狗,工作稳定可靠。遥控可以使机器人的操作更加方便,本系统中要通过智能手机遥控机器人,而智能手机的信号正是通过蓝牙发出,因此只需在机器人上安装蓝牙模块。由于机器人只接受数据,不发送数据,所以只需蓝牙的从机模块即可。采用了型号为HC-06的蓝牙模块,其中编号06就表示其为从机模块,在蓝牙模块的命名规则中偶数命名的型号出厂时就确定了从机,并无法更改。用户不可以自己切换主机或者从机,用户可以空
- 盘点:那些为健康而生的APP与智能硬件(11-24)
- 指尖的密码!手指静脉识别鼠标问世(02-02)
- WLAN射频优化的解决方案设计详解(03-03)
- 智能鞋垫:解决跑步者的膝伤问题(02-12)
- 混合动力汽车系统结构大盘点TOP3(03-14)
- 盘点STM32-NUCLEO开发与仿真平台(03-28)