四轴飞行器三相六臂全桥驱动电路
时间:04-05
来源:网站整理
点击:
似的,就可以成功检测出各相的过零事件。
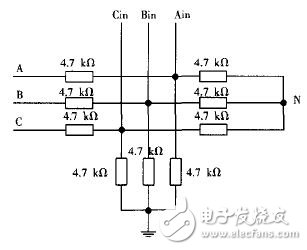
图2 反电势检测电路
电机的反电势检测出来后,就可以找到反电势的过零点,在反电势过零后延迟30°电角度进行换向操作。
驱动电路采用三相六臂全桥电路,MOSFET 作为开关元件,利用ATmega 16 单片机作为控制芯片,反电势过零检测以及软件启动的控制方式,并延迟30°进行换向。正常启动后,单片机输出PWM 实现无刷直流电机转速调节。同时设计了电压、电流监测电路,保证系统安全,因而,该系统能够正常驱动无位置传感器无刷直流电机,并且能够应用于四轴飞行器。
- 无人机技术科普:硬件与算法外 还有“状态”视角(05-20)
- 什么是无人机避障技术 在消费级无人机领域为什么火不了?(11-19)
- 浅谈无人机飞控系统解决方案(03-22)
- 无人机系统解决方案及应用趋势集锦TOP7(03-24)
- 解读ATmega2560无人机摇杆微控制器设计方案(04-13)
- 无人机快速充电设计方案解析(04-19)