浅谈无人机飞控系统解决方案
时间:03-22
来源:互联网
点击:
随着科学技术的发展以及军事战略思想的转变,无人机在军事、民用等领域获的应用越来越广泛,比如航空测量、航空摄影、侦察、森林防火等。为解决困扰我国无人机发展的高精度和小型化的难题,我公司经过几年的研究终于攻克了难关,开发出一套具有我国自主知识产权的无人机飞控系统。高精度要求无人机的制导控制精度高,能够适应复杂的外界环境。小型化则对控制系统的重量和体积提出了更高的要求,要求控制部件的体积越小越好。
控制系统由四部分组成
嵌入式计算机系统、GPS 接收模块、IMU、接口
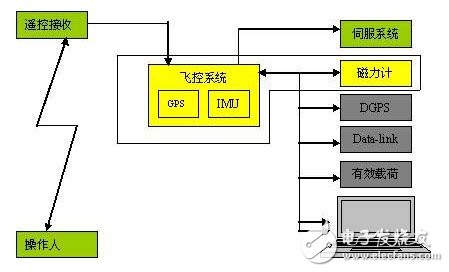
软件界面

方案特点
姿态和速度控制,正常情况下使用姿态稳定和速度控制,在出现较大的干扰情况下使用速度稳定和姿态控制,大大增加了飞行安全;实现了遥控手柄、航路点和地形匹配引导功能。可以由外环生成内环控制指令;通过扩展卡尔曼(EKF)滤波实现GPS/INS 捷联组合导航;对飞行负载、重心等变化的自适应性,大大提高了飞行精度和飞行安全; 3M 数据记录空间; 导航算法对震动和其他干扰适应能力强。即使在恶劣的震动情况下也能得到满意的导航数据;使用VxWorks 或uCOS 操作系统,实时强,可靠性高,方便裁减,方便在不同硬件平台上移植。对硬件的依赖性低。
- 无人机技术科普:硬件与算法外 还有“状态”视角(05-20)
- 什么是无人机避障技术 在消费级无人机领域为什么火不了?(11-19)
- 无人机系统解决方案及应用趋势集锦TOP7(03-24)
- 解读ATmega2560无人机摇杆微控制器设计方案(04-13)
- 无人机快速充电设计方案解析(04-19)
- 无人机系统MUC技术方案集锦TOP6(04-26)