导购机器人控制系统电路设计
随着科学技术发展和人民生活水平提高,机器人已经开始进入了人们的生活中。这个时代的来临,出现了各种新型机器人,如清扫机器人、安防机器人。移动机器人的最重要的部分之一:导航系统,更加引起机器人领域的关注。机器人导航系统对许多机器人应用领域至关重要如:智能仓库,超市导购,家用机器人,自动化图书馆,智能医院等。比较普遍的是寻线机器人。实际设计中发现:因为受到固定线的限制,这种体系并不能实现真正意义上的全方位的自主运行。另外,这种方法受到光的影响很大,不能实际的应用与生活中。线在地表也会影响地面美观。在经过充分的文献查找和思考后提出了一种新的机器人导航系统,把RFID,地磁感应,DSP等技术融合。进行了实际的系统硬软件设计和稳定性测试。
系统主板与传感模块
关于电源,系统采用12V锂电池供电,采用三端正电压调节器调节电压。内部集成功率保护。输出电流可以达到1A。输入耐压可以到达30V。提供充电接口,通过开关进行控制,电路板上留有接口,可以对锂电池进行充电。定位装置采用射频技术。从信息传递的基本原理来说,射频识别技术在低频段基于变压器耦合模型,在高频段基于雷达探测目标的空间耦合模型(雷达发射电磁波信号碰到目标后携带目标信息返回雷达接收机)。最基本的RFID系统由三部分组成:标签、阅读器、天线。按作用距离可分为密耦合卡(作用距离小于1厘米)、近耦合卡(作用距离小于15 厘米)、疏耦合卡(作用距离约1米)和远距离卡(作用距离从1米到10米,甚至更远)。本系统采用近耦合卡。射频模块与2812的SCIA口进行通讯。通过对数据流进行解码,判断机器人的位置。
接着是红外避障模块。一般机器人的避障可以采用红外反射的方法,这在机器人比赛中比较普遍。GPIO控制红外线的发射,然后如果遇到障碍物会反射回来,接收管子收到光线后引起电阻变化,检测其电阻变化就可以判断是否有障碍物了。但是这种方法容易受到光噪声的干扰。所以距离比较近,一般只能达到2-3cm。本人在多次比赛中,经过查资料和研究,提出了一种使用标准高频信号38KHZ的红外线进行障碍的探测的电路。因为使用高频信号和高频运放,有了一定的抗干扰能力,同时探测的距离的最大提高到8cm。首先,通过555发射红外线。接着,信号通过红外接收管后经过隔直电容,送入高频运放LM318N。然后,经过50倍的放大。
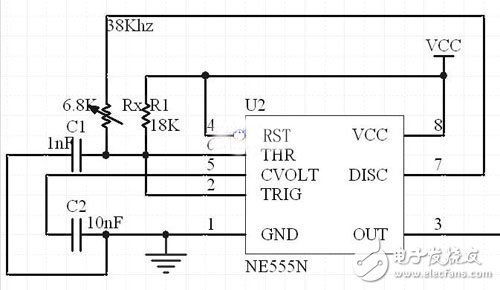
图 1 555发射电路
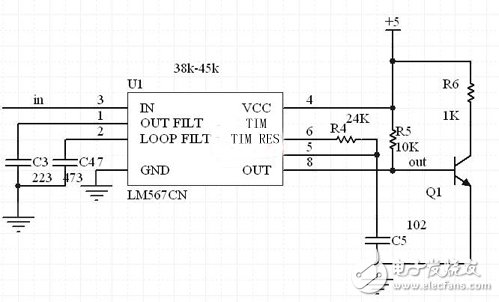
图 2 频率识别电路
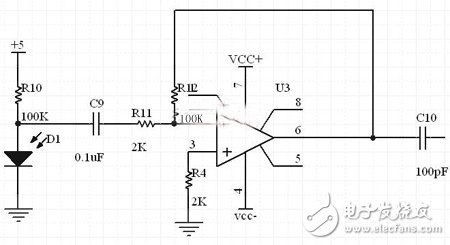
图 3 检测放大电路
LM567是锁相环电路, 8脚双列直插封装。第5、6脚外接的电阻和电容决定了内部压控振荡器的中心频率。1、2脚通常分别通过一个电容器接地,产生输出滤波网络和环路单级低通滤波网络。2脚接的电容决定锁相环路的捕捉带宽:电容值越大,环路带宽越窄。压控振荡器的中心频率和滤波带宽可由式决定。
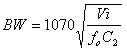 (4) (其中Vi为输入电压)
(4) (其中Vi为输入电压)
然后是电子罗盘模块。CMPS03 电子罗盘是平面角度传感器。通过检测当前传感器与地球磁场直接的角度,电子罗盘可以获得分辨率为0.1度的绝对旋转角度。这个电子罗盘模块是专门为机器人而制造,目的为了给机器人提供合适的方向导航信号。对于任何方向,都可以生成独一无二的编码。该传感器使用PHILIPS的KMZ51地磁感应芯片,其精度很高。有两种输出方式,第一种:I2C方式,由Pin2(SCL)和Pin3(SDA)输出。Pin7和Pin5必须悬空。Pin6用来进行校正。这些管脚都接到主板上,由于模块是5V供电,而DSP是3.3V所以还需要用74LVC245进行电平转换。通过2812的GPIOB通过Pin6对系统进行校正。校正只需要做一次,因为数据会保存在电子罗盘中的PIC单片机的EEPROM。第6脚有一个上拉电阻。进行校正只需要通过GPIO给Pin6一个负相脉冲,而且因为有上拉电阻,所以,此管脚与系统断开也是可以的。
最后是系统的驱动模块的设计。采用L298芯片。比较常见的是15脚MulTIwatt封装的 L298N,内部同样包含4通道逻辑驱动电路。L298内含的功率输出器件设计制作在一块石英基片上,由于制作工艺的同一性,因而具有分立元件组合电路不可比拟的性能参数一致性,工作稳定。15脚是输出电流反馈引脚,其它与L293相同。在通常使用中这两个引脚也可以直接接地。它是高电压的,高电流的双全桥驱动芯片。可以直接接受标准的TTL逻辑电平。可以驱动各种负载如电机,继电器等。有两个使能输入,通过它控制PWM波的有效性。L298集成有两个能量输出块A,B。另外,我们设计的板子上加有续流二极管。
电子发烧友网技术编辑点评分析:
本文采用了无线射频识别技术、红外线距
- 盘点:那些为健康而生的APP与智能硬件(11-24)
- 指尖的密码!手指静脉识别鼠标问世(02-02)
- WLAN射频优化的解决方案设计详解(03-03)
- 智能鞋垫:解决跑步者的膝伤问题(02-12)
- 混合动力汽车系统结构大盘点TOP3(03-14)
- 盘点STM32-NUCLEO开发与仿真平台(03-28)