智能灭火机器人硬件电路的设计
时间:10-17
来源:互联网
点击:
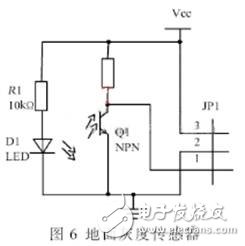
面灰度的判断,因此需使用能对地面反射光线的强弱做出反应的传感器。本机器使用一对地面灰度传感器,放置在前后两端的底座上。地面颜色越深,其值越大,地面颜色越浅,其值越校
如图6所示,地面灰度传感器通过发光二极管LED照亮地面,地面的反射光线被光敏三极管接收,当地面颜色为黑色时,反射的光线比较弱,则光敏三极管的基极电流越小,集电极电流也相应较小,1端口电压值较高,其测量值较大;反之当地面为白色时,反射的光线较强,集电极电流越大,1端口电压值较小,测量值也较小。
本文研究并设计了基于ARM9嵌入式系统的一种智能灭火机器人,具有以下5个创新点:(1)采用了嵌入式系统内核,大大提高了机器人处理信号的能力;(2) 双电源供电系统引入,使机器人的运行更加稳定可靠;(3) 采用PWM信号控制大功率直流电机,在速度和精度方面有了很大的改进;(4)通过合理选择PSD测距传感器的个数和安放位置,既满足比赛要求,又能节约成本;(5)本文设计的远红外火焰传感器组,很好地完成了对火源的精确定位任务,提高了灭火可靠性和快速性。实测证明,本文设计的机器人能够很好地完成比赛任务,并且在可靠性和速度方面都有了大幅度的提高,具有很强的应用价值。
- 机器人关键技术及前沿应用设计集锦(10-24)
- 应用于车身传输领域的机器人技术(10-21)
- 机器人技术科普之必知工业机器人分类(10-20)
- 伺服控制智能助力机械手系统功能分析(10-21)
- 实时语音识别系统在家庭监护机器人的实现(11-16)
- 中国机器人现状:核心技术缺失 ,与人共融成突破点(02-28)