揭秘VR及移动设备如何实现眼动追踪
2016年被广泛认为是VR元年,随着VR智能眼镜、VR跑步机、VR摄影机等等VR虚拟现实产品相继问世,眼动追踪等相关技术开始进入高速发展阶段。这其中也能为用户带来更为震撼的视觉感受,随着眼镜移动而进行场景的变换,这就像是我们自己的眼睛一样,那这些VR产品是如何实现眼球追踪技术的呢?本文介绍两种MEMS技术在眼动追踪中的应用。
什么是眼动追踪
眼动追踪(Eye Tracking),是指通过测量眼睛的注视点的位置或者眼球相对头部的运动而实现对眼球运动的追踪。眼动仪是一种能够跟踪测量眼球位置及眼球运动信息的一种设备,在视觉系统、心理学、认知语言学的研究中有广泛的应用。
移动端的眼动追踪技术也开始发展,苹果申请了若干相关专利,通过"该技术可以根据用户视线延迟显示屏操作的执行,还可以改变用户界面,生成并执行相关信息。例如,当用户输入文本时如果出现拼写错误,且眼睛正在注视错词,系统将自动修正;如果设备发现用户的视线没有注视错词,系统将延迟修正。苹果认为该功能可以让操作更直观。"(该描述来自苹果2012年9月提交的专利申请)

LG和三星也曾推出过具有眼动追踪技术的手机。如三星Galaxy SIII就可以通过检测用户的眼睛状态来控制锁屏的时间,同时眼球还可以来控制页面的上下滚动。
无创眼动追踪
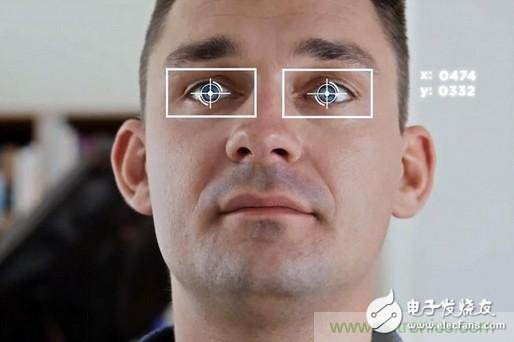
一种比较常用的无创眼动追踪方式为视频/图像捕捉。摄像头拍摄得到眼部图片,具有一些可以提取的特征,经过某些图像处理的算法提取出这些特征参数,从而确定眼球位置,用于判定人眼注视的方向和目标,计算结果由处理器CPU反应于你所使用的VR/AR设备上。
根据7invensun的介绍,眼图录像法和角膜反射法都属于该类方法。
眼图录像法主要是通过辨认眼球的特征如瞳孔外形、异色边缘(虹膜、虹膜边界)、近距指向光源的角膜反射来实现眼动跟踪。根据云视频的宣传,其所提到的能够读懂人"眼神意识"的视频技术,就是基于此项技术。然而虹膜识别+瞳孔运动识别虽然可以捕捉人眼的动作但却无法检测到人眼的注视点,这才是最硬的伤!
首先虹膜识别和瞳孔识别都是基于一个平面的,要测量注视点就必须保证头部是固定的,让眼睛同头和注视点的相对位置一致才可以。人眼作为人体最精细的器官之一,注视点转移仅需要一个微小的动作,而人类仅仅因为呼吸而造成的头部动作就足以让测量误差造成定位偏移。然后我们再退一万步讲,即使头部是固定的,对于虹膜的识别也没那么容易,欧洲人的人眼特征较为明显,识别相对容易,但也不是一个家用普通摄像头就可以判断眼球特征的,而亚洲人瞳孔多为深褐色,人眼特征较弱,普通摄像头几乎无法捕捉。因此从云视链的眼球追踪技术的出发点来说,通过眼神就能推送出你想要的信息是不可能的了!
角膜反射法是目前眼球追踪领域广泛认可并应用的方法,主要通过摄像头捕捉人眼特征,通过算法建立人眼二维或者三维注视点估计模型,通过算法判断人眼动作和注视点。眼球的特殊构造会形成一到多个浦肯野像,基于这种方法的眼球追踪一般定位第一浦肯野像,通过定标步骤,可以测量出处在垂直平面现实定标点表面上人眼的注视点。
有创眼动追踪
有创手段包括在眼睛中埋置眼动测定线圈或使用微电极描记眼电图。眼电图(electrooculography )检测方式通过电极测量当眼球移动时的电位变化,其原理是眼球可以被考虑为偶极子。其优点是成本低,但普及型差。
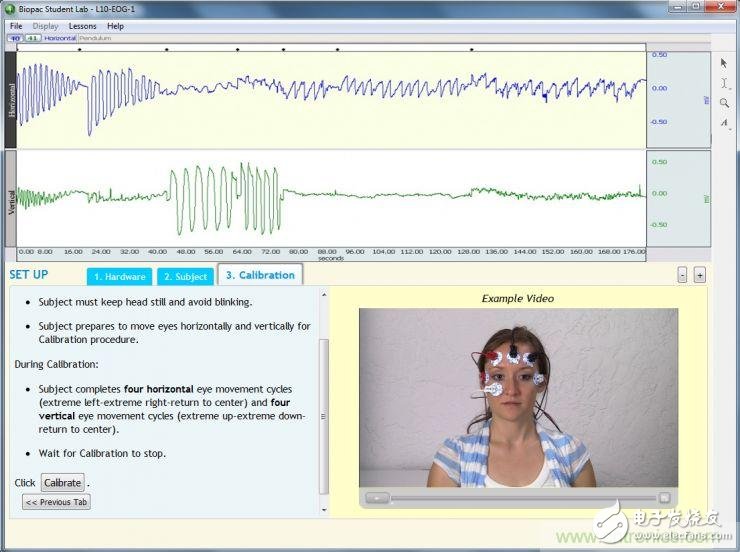
图示为眼电图方法及收集信号示意图
MEMS技术与眼动追踪相结合
技术优点
MEMS(Micro electro mechanical systems,微机电系统/微机械/微系统),是采用微电子技术、集成电路技术及其加工工艺制作而成的微米级别机械器件。MEMS往往会采用常见的机械零件和工具所对应微观模拟元件,例如它们可能包含通道、孔、悬臂、膜、腔以及其它结构。
MEMS传感器、驱动器同样可以实现眼球追踪功能,并且具有极大的发展潜力。MEMS器件的特征长度从1毫米到1微米,相比之下头发的直径大约是50微米。MEMS器件主要优点是体积小、重量轻、功耗低、可靠性高、灵敏度高、易于集成等,是微型传感器/驱动器的主力军,正在逐渐取代传统机械器件。
其成本有可能通过工艺优化、批量生产大幅度降低,主要原因是由于MEMS生产不同于传统加工制造生产,MEMS采用类似于集成电路的制造工艺,由于产品体积小,在一个二十厘米的硅片上可一次性生产出上千器件。若单个MEMS传感器芯片面积为5mmx5mm (也有大量MEMS传感器可以小于毫米尺度),则一个8英寸(直径20厘米)
- 残疾人的福音 只需眼睛就可独立操控电脑(02-08)
- 基于FPGA的VRLA蓄电池测试系统设计(06-08)
- 飞思卡尔防夹车窗升降参考设计(02-14)
- Atmel高效智能家用电器解决方案(02-12)
- 智能汽车演进从车窗升降参考设计开始(03-16)
- 浅谈VR输入技术 本土动捕解决方案有哪些?(05-15)