利用MEMS陀螺仪实现低噪声反馈控制设计
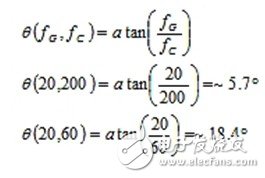
除了影响总的角速度噪声外,陀螺仪滤波器还会对总的环路响应产生相位延时,这将直接影响反馈控制系统中的另一个重要的品质因数:单位增益交越频率点的相位余量。公式9提供的公式可以用来估计单极点滤波器(fC =截止频率)在单位增益交越频率点(fG)对控制环路频率响应造成的相位延时(θ)。公式9中的两个例子给出了滤波器截止频率分别是200Hz和60Hz时单位增益交越频率20Hz点的相位延时。这种对相位余量的影响可能导致规定陀螺仪的带宽比单位增益交越频率高10倍,从而把更多的重点放在选择具有良好RND水平的MEMS陀螺仪上面。
现代控制系统经常使用数字滤波器,因此在预测控制环路关键频率点的相位延时时可能用不同的模型。举例来说,公式10用于预测与16抽头FIR滤波器(NTAP)相关的相位延时(θ),该滤波器运行在ADXRS290的4250 SPS (fS)刷新率条件下,并具有同样20Hz的单位增益交越频率(fG)。这种关系有助于确定在这种滤波器结构下系统架构允许的总抽头数量。

本文小结
总之,角速度反馈环路中的噪声对运动控制系统中的关键性能标准有直接的影响,因此对一个新系统来说需要在设计过程的早期加以考虑。那些能够量化角速度噪声如何影响系统级行为的人要比只知道需要"低噪声"的人拥有显著的优势。他们能够确立性能目标,并在他们的应用中形成可观察的值,并且当项目其它目标鼓励考虑特定MEMS陀螺仪时能够更好地量化系统级结果。
一旦基本的理解到位后,系统设计师就能专注于确定能够满足他们性能要求的MEMS陀螺仪,并使用带宽、速度噪声密度(RND)或角度随机游走(ARW)指标来指导他们的想法。当他们需要优化从所选的传感器认识到的噪声性能时,他们能够使用与带宽(角速率噪声)和积分时间(角度误差)的关系来形成其它重要的系统级定义,进而支持最适合的应用性能。
- 微电子机械系统加速传感器瞄准医疗领域的应用(04-02)
- 可穿戴传感器的类型及其重要性(02-10)
- VR利器惯性动作捕捉系统原理及优缺点解析(04-06)
- 无人机的飞行感知技术解析(02-03)
- 基于MPU-3000?系列运动处理组件的三轴陀螺(11-23)
- 单轴MEMS偏航陀螺仪结构应用(11-16)