利用MEMS陀螺仪实现低噪声反馈控制设计
所有MEMS陀螺仪的角速率测量都存在噪声。这种固有的传感器噪声代表陀螺仪工作在静态惯性(没有旋转运动)和环境条件(没有振动、冲击等)下输出中的随机变化。MEMS陀螺仪数据手册中描述它们噪声行为的最常用指标是速度噪声密度(RND)和角度随机游走(ARW)。RND参数一般使用的单位是degrees/sec/√Hz,它根据陀螺仪的频率响应从角速度方面提供了预测总噪声的简单方法。
ARW参数一般使用的单位是degrees/√hour,在分析指定时间内噪声对角度估计值的影响时更加有用。公式2提供了根据角速度测量结果估计角度的通用公式。另外,它也提供了将RND参数关联到ARW参数的简单公式。这个关系代表了在IEEE-STD-952-1997(附录C)基础上的小改变(单侧与双侧FFT)。
图3提供了图形参考,它有助于进一步讨论ARW参数表示的行为。这张图中的绿色虚线代表陀螺仪的RND等于0.004 degrees/sec/√Hz时的ARW行为,相当于ARW为0.17 degrees/√hour。实线代表这个陀螺仪的输出在25ms时间内的6次单独积分。角度误差相对于时间的随机属性表明,ARW的基本用途是估计在规定积分时间内角度误差的统计分布。另外值得注意的是,这种响应假设使用高通滤波滤除了积分过程中的初始偏置误差。
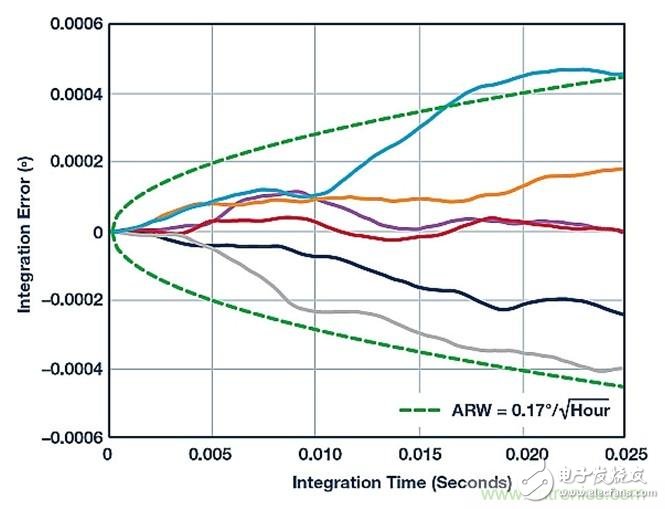
图3:角度随机游走(ADIS16460)
回顾图2所示的应用例子,将公式1和2组合起来可以将重要标准(检查表面上的物理失真)关联到MEMS陀螺仪数据手册中常见的噪声性能指标(RND,ARW)。在这个过程中,假设公式1的积分时间(τ)等于图像捕获时间,这样可以得到有用的再次简化。公式3应用公式1的通用关系来估计当摄像机离检查表面1米(D)远以及最大允许失真误差为10μm (dRE)时,来自陀螺仪的角度误差必须小于0.00057度。
公式4整合了公式3的结果和公式2中的通用关系来预测特定情形下对MEMS陀螺仪的ARW和RND要求。这个过程假设35ms的图像捕获时间代表来自公式2的积分时间(τ),进而导致预测陀螺仪的ARW需要小于0.18 degrees/hour1/2,或RND必须小于0.0043 degrees/sec/Hz1/2才能支持这个要求。当然,这可能不是这些参数支持的唯一要求,但这些简单的关系确实提供了如何关联到已知要求和条件的样例。

角速度噪声与带宽
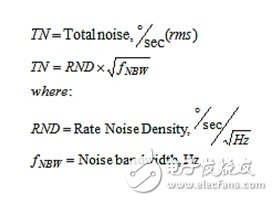
提供连续指向控制的系统开发人员可能选择根据角速度来评估噪声影响,因为他们可能没有固定的积分时间来利用基于ARW的关系。根据角速度评估噪声经常要考虑RND参数和陀螺仪信号链中的频率响应。陀螺仪的频率响应通常受滤波的影响最大,它支持针对环路稳定标准的特殊应用要求,并能抑制对环境威胁的不良传感器反应,比如振动。公式5提供了估计与特定频率响应(噪声带宽)和RND有关的噪声的一种简单方法。
当RND的频率响应符合单极点或双极点的低通滤波器规范时,根据公式6中的关系,噪声带宽(fNBW)将与滤波器的截止频率(fC)有关。 20160706A09 举例来说,图4针对RND为0.004 degrees/sec/√Hz的ADXRS290中的噪声提供了两个不同的频谱图。在这张图中,黑色曲线代表使用双极点低通滤波器时的噪声响应,这个滤波器的截止频率是200Hz;而蓝色曲线代表使用单极点低通滤波器时的噪声响应,这时的滤波器截止频率是20Hz。公式7可以用来计算每个滤波器的总噪声。正如预期的那样,200Hz版本的噪声要比20Hz版本高。

举例来说,图4针对RND为0.004 degrees/sec/√Hz的ADXRS290中的噪声提供了两个不同的频谱图。在这张图中,黑色曲线代表使用双极点低通滤波器时的噪声响应,这个滤波器的截止频率是200Hz;而蓝色曲线代表使用单极点低通滤波器时的噪声响应,这时的滤波器截止频率是20Hz。公式7可以用来计算每个滤波器的总噪声。正如预期的那样,200Hz版本的噪声要比20Hz版本高。
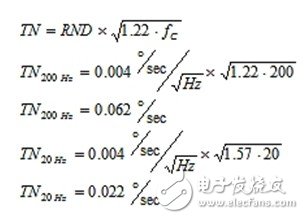

图4:带滤波器的ADXRS290噪声密度
在系统要求定制滤波的场合,其频率响应(HDF(f))不符合公式6和7中简单的单极点和双极点模型,公式8提供了更为通用的关系来预测总噪声:
除了影响总的角速度噪声外,陀螺仪滤波器还会对总的环路响应产生相位延时,这将直接影响反馈控制系统中的另一个重要的品质因数:单位增益交越频率点的相位余量。公式9提供的公式可以用来估计单极点滤波器(fC =截止频率)在单位增益交越频率点(fG)对控制环路频率响应造成的相位延时(θ)。公式9中的两个例子给出了滤波器截止频率分别是200Hz和60Hz时单位增益交越频率20Hz点的相位延时。这种对相位余量的影响可能导致规定陀螺仪的带宽比单位增益交越频率高1
- 微电子机械系统加速传感器瞄准医疗领域的应用(04-02)
- 可穿戴传感器的类型及其重要性(02-10)
- VR利器惯性动作捕捉系统原理及优缺点解析(04-06)
- 无人机的飞行感知技术解析(02-03)
- 基于MPU-3000?系列运动处理组件的三轴陀螺(11-23)
- 单轴MEMS偏航陀螺仪结构应用(11-16)