角度传感器IC中的片载线性化功能
此,针对具有较高曲率的区域可以使用更精细的分段。然而,这些增强措施都会导致更长的处理时间和更高的复杂性。
谐波线性化
谐波线性化技术用15个谐波的形式进行线性化,这些谐波的相位和幅度用快速傅里叶变换(FFT)的方法确定,而FFT的对象是在客户末端生产线的角度传感器IC周围的磁体一次旋转收集到的数据。
谐波线性化功能具有很大的灵活性。15个谐波中的每个谐波的幅度和相位值都存储在12位的EEPROM域中,在线性化过程中需要应用的谐波数量可以由用户指定。除了支持侧轴应用外,内置于这种线性化方法中的灵活性在去除客户末端生产线中的静态错位误差时也非常有用。
角度延迟考虑
分段式和谐波线性化技术都非常适合同轴和偏轴磁性应用。虽然分段式线性化将磁性范围划分为更小的部分,并对这些更小的部分以分段的方式线性化,但谐波线性化允许对误差信号进行正弦式补偿,这将有助于消除错位和侧轴布置中的高谐波误差内容。来自谐波线性化的增强性能需要付出更多运算时间的代价:被称为"延时"的一种情形。
对许多应用来说,额外延时不是个问题。举例来说,在典型的电子动力转向(EPS)系统手轮角度传感器IC中,每隔1ms要求一个新的角度值,这意味着有足够的时间执行甚至15个谐波的线性化,如图5。另外,许多应用会使用传感器的ORATE(可编程输出速率)功能,以便通过超采样来减小角度测量的本底噪声。这样也能提供足够的时间来执行线性化功能,并且不增加延时,因为额外的平均允许有更多的时间用于线性化操作。
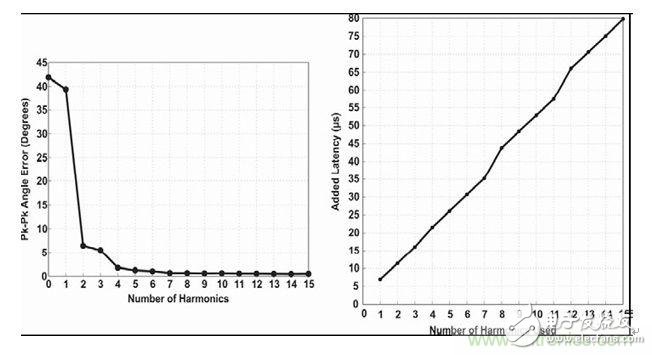
图5:线性化后的角度误差(左)和增加的角度延时(右)与所用谐波数量的关系。
XYZ错位效应
为了评估线性化后的角度传感器IC的机械性错位效应,可以执行如图6所示的映射分析。结果显示了角度误差性能对磁体尺寸的依赖性。从图中可以看到,更高的环形磁体可以更好的容忍垂直性错位,而更厚的环形磁体可以更好的容忍空气间隙的变化。
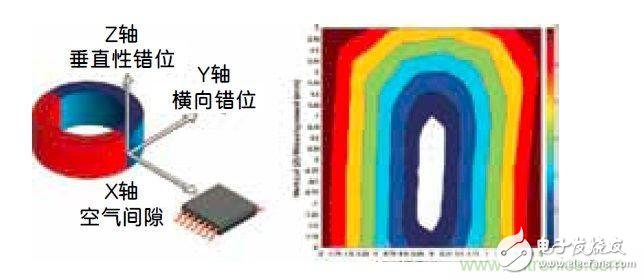
图6:错位效应:(左)X、Y和Z映射轴的定义;(右)当空气间隙=4mm时的错位性能(坚轴和横轴)。
本文小结
片上可编程且可定制的线性化功能,就像A1332角度传感器IC中实现的那样,允许系统设计师在不增加系统设计的额外复杂性和成本的条件下,满足前面所述的精度目标。虽然分段式线性化可以取得更快的处理时间,但受限于校正正弦误差项的能力。谐波线性化在这方面可以做的更好。另外,谐波线性化方法中的灵活性,特别是改变所用校正谐波数量的能力,允许用户在运算时间和误差性能之间达到最佳平衡。结果是在应用线性化技术后,±20°的角度误差可以减小到±0.3°以内。
不管系统级设计师面临的是什么样的角度检测挑战,合适的磁性设计和先进的片上线性化功能组合都有助于达到理想的性能,同时最大程度地减小由此增加的复杂性和成本。
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)