IR2104芯片驱动电路实现智能车差速控制方案
是电机的转速,NU是电机的两端的电压,eC、TC、Nφ对于我们来说可以看成一个定值,emT是负载转矩,车做好之后该值基本确定不变,剩下一个重要的参数aR电机电枢回路的阻值,电机本身的内阻很小,如果外部引入的电阻过大,此时直流电动机转速降落较大,驱动电路效率较低,电机性能不能充分发挥。为了提高电机的转速我们应该尽量减小电机电枢回路绕组的阻值,我们知道:N沟道的MOSFET具有极低的导通电阻,IRF3205导通电阻在8m?左右,而IRF4905几乎是其两倍,那么是不是可以考虑全部使用N沟道的3205来搭我们的驱动电路呢,答案也是肯定的,只不过需要换一片栅极驱动芯片就行!
在这里给大家介绍的是IR公司的IR2104,因为IR公司号称功率半导体领袖,当然2104也相对比较便宜!IR2104可以驱动可以驱动高端和低端两个N沟道MOSFET,能提供较大的栅极驱动电流,并具有硬件死区、硬件防同臂导通等功能。使用两片IR2104型半桥驱动芯片可以组成完整的直流电机H桥式驱动电路。但是需要12V驱动!
IR2104基本应用电路:
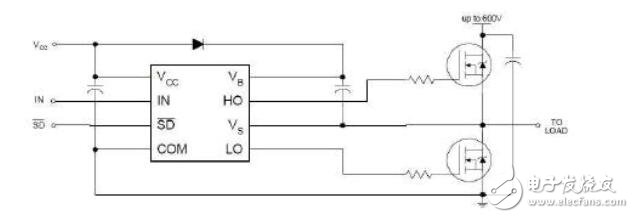
SD信号时一个使能信号,跟前面的BTS的INH信号输入端类似,高电平有效,芯片工作,IN为高电平时HO为高,LO为低,IN为低电平时,HO为低,LO为高电平!
关于其中关键参数的选择:

这个驱动设计单从信号逻辑上分析比较容易理解,但要深入的理解和更好的应用,就需要对电路做较深入的分析,对一些外围元件的参数确定做理论分析计算。图中IC是一个高压驱动芯片,驱动1个半桥MOSFET。Vb,Vs为高压端供电;Ho为高压端驱动输出;COM为低压端驱动供电,Lo为低压端驱动输出;Vss为数字电路供电.此半桥电路的上下桥臂是交替导通的,每当下桥臂开通,上桥臂关断时Vs脚的电位为下桥臂功率管Q2的饱和导通压降,基本上接近地电位,此时Vcc通过自举二极管D对自举电容C2充电使其接近Vcc电压。当Q2关断时Vs端的电压就会升高,由于电容两端的电压不能突变,因此Vb端的电平接近于Vs和Vcc端电压之和,而Vb和Vs之间的电压还是接近Vcc电压。当Q2开通时,C2作为一个浮动的电压源驱动Q2;而C2在Q2开通其间损失的电荷在下一个周期又会得到补充,这种自举供电方式就是利用Vs端的电平在高低电平之间不停地摆动来实现的.由于自举电路无需浮动电源,因此是最便宜的,如图所示自举电路给一只电容器充电,电容器上的电压基于高端输出晶体管源极电压上下浮动。图中的D和C2是IR2104在脉宽调制(PWM)应用时应严格挑选和设计的元器件,根据一定的规则进行计算分析;并在电路实验时进行调整,使电路工作处于最佳状态,其中D是一个重要的自举器件,应能阻断直流干线上的高压,其承受的电流是栅极电荷与开关频率之积,为了减少电荷损失,应选择反向漏电流小的快恢复二极管,芯片内高压部分的供电都来自图中自举电容C2上的电荷;为保证高压部分电路有足够的能量供给,应适当选取C2的大小。
供参考的电路,其中的参数参考北科大技术报告:

其工作的原理在此不在赘述仅提供其工作的真值表,如下:

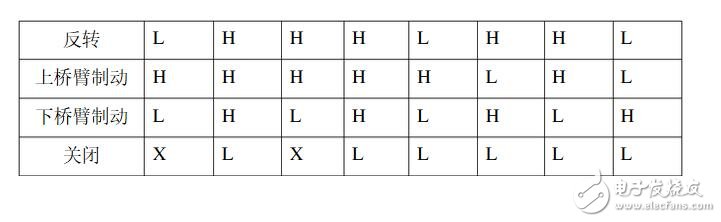
IR2104比较便宜,有钱的同学可以再去研究研究TD340,基本原理都是大同小异!
- 电容降压LED驱动电路(06-24)
- 新型大功率蓝光LED光源驱动电路设计(08-03)
- 电动自行车控制器MOSFET驱动电路的设计(11-18)
- 两种常见的MOSFET驱动电路设计(12-02)
- 大功率LED恒流驱动电路的设计实例(06-06)
- 高频逆变电源的保护与驱动电路的设计(06-26)