采用自举升压结构设计双电压mosfet驱动电路
百兆赫兹。本文正是采用了自举升压电路,设计了一种具有大负载电容驱动能力的,适合于低电压、高开关频率升压型DC-DC转换器的驱动电路。电路基于Samsung AHP615 BiCMOS工艺设计并经过Hspice仿真验证,在供电电压1.5V ,负载 电容为60pF时,工作频率能够达到5MHz以上。
自举升压电路
自举升压电路的原理图如图1所示。所谓的自举升压原理就是,在输入端IN输入一个方波信号,利用电容Cboot将A点电压抬升至高于VDD的电平,这样就可以在B端输出一个与输入信号反相,且高电平高于VDD的方波信号。具体工作原理如下:
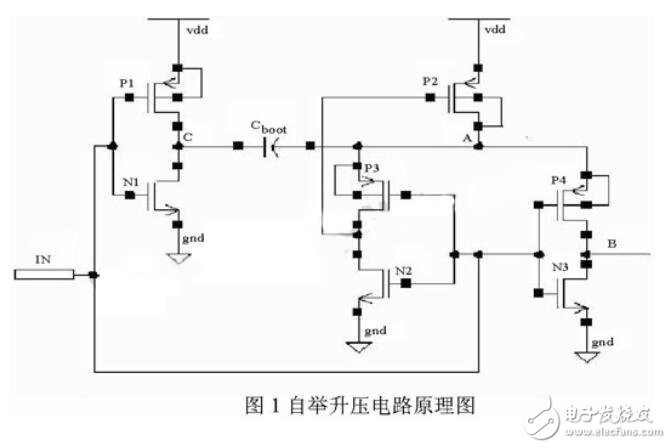
当VIN为高电平时,NMOS管N1导通,PMOS管P1截止,C点电位为低电平。同时N2导通,P2的栅极电位 为低电平,则P2导通。这就使得此时A点电位约为VDD,电容Cboot两端电压UC≈VDD。由于N3导通,P4截止,所以B点的电位为低电平。这段时间称为预充电周期。
当VIN变为低电平时,NMOS管N1截止,PMOS管P1导通,C点电位为高电平,约为VDD。同时N2、N3截止,P3导通。这使得P2的栅极电位升高,P2截止。此时A点电位等于C点电位加上电容Cboot 两端电压,约为2VDD。而且P4导通,因此B点输出高电平,且高于VDD。这段时间称为自举升压周期。
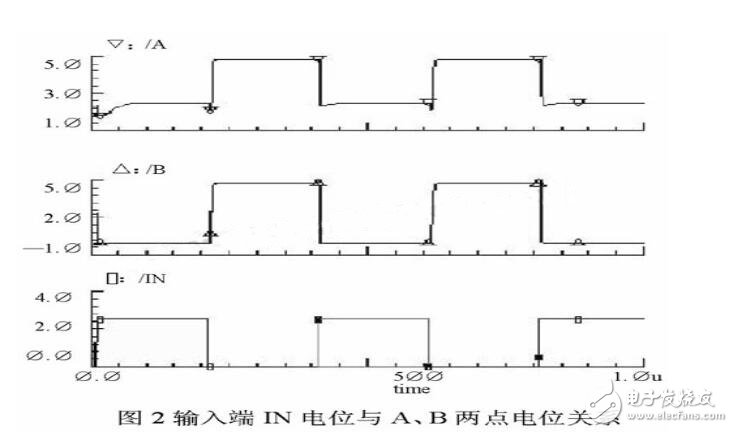
实际上,B点电位与负载电容和电容Cboot的大小有关,可以根据设计需要调整。具体关系将在介绍电路具体设计时详细讨论。在图2中给出了输入端IN电位与A、B两点电位关系的示意图。
驱动电路结构
图3中给出了驱动电路的电路图。驱动电路采用Totem输出结构设计,上拉驱动管为NMOS管N4、晶体管Q1和PMOS管P5。下拉驱动管为NMOS管N5。图中CL为负载电容,Cpar为B点的寄生电容。虚线框内的电路为自举升压电路。
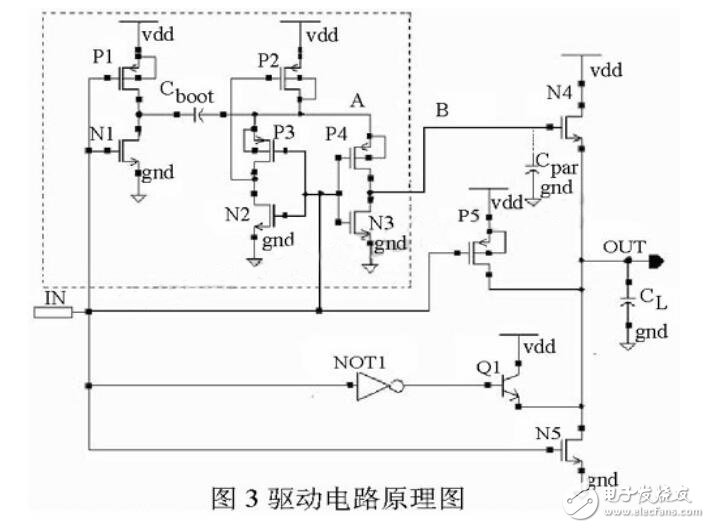
本驱动电路的设计思想是,利用自举升压结构将上拉驱动管N4的栅极(B点)电位抬升,使得UB>VDD+VTH ,则NMOS管N4工作在线性区,使得VDSN4 大大减小,最终可以实现驱动输出高电平达到VDD。而在输出低电平时,下拉驱动管本身就工作在线性区,可以保证输出低电平位GND。因此无需增加自举电路也能达到设计要求。
考虑到此驱动电路应用于升压型DC-DC转换器的开关管驱动,负载电容CL很大,一般能达到几十皮法,还需要进一步增加输出电流能力,因此增加了晶体管Q1作为上拉驱动管。这样在输入端由高电平变为低电平时,Q1导通,由N4、Q1同时提供电流,OUT端电位迅速上升,当OUT端电位上升到VDD-VBE时,Q1截止,N4继续提供电流对负载电容充电,直到OUT端电压达到VDD。
在OUT端为高电平期间,A点电位会由于电容Cboot 上的电荷泄漏等原因而下降。这会使得B点电位下降,N4 的导通性下降。同时由于同样的原因,OUT端电位也会有所下降,使输出高电平不能保持在VDD。为了防止这种现象的出现,又增加了PMOS管P5作为上拉驱动管,用来补充OUT端CL的泄漏电荷,维持OUT端在整个导通周期内为高电平。
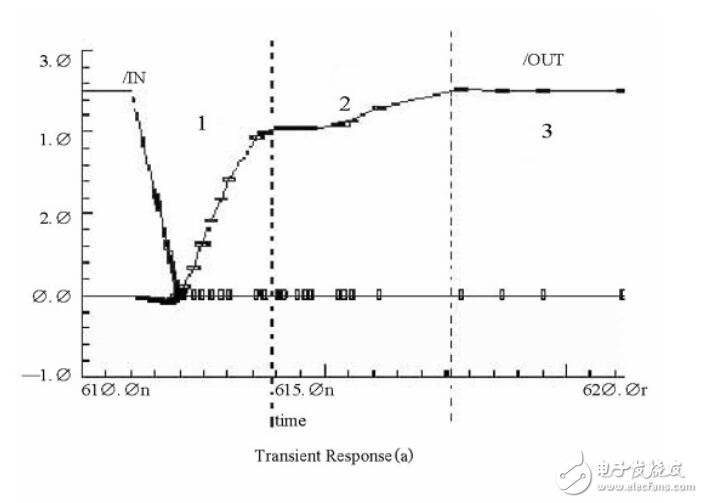
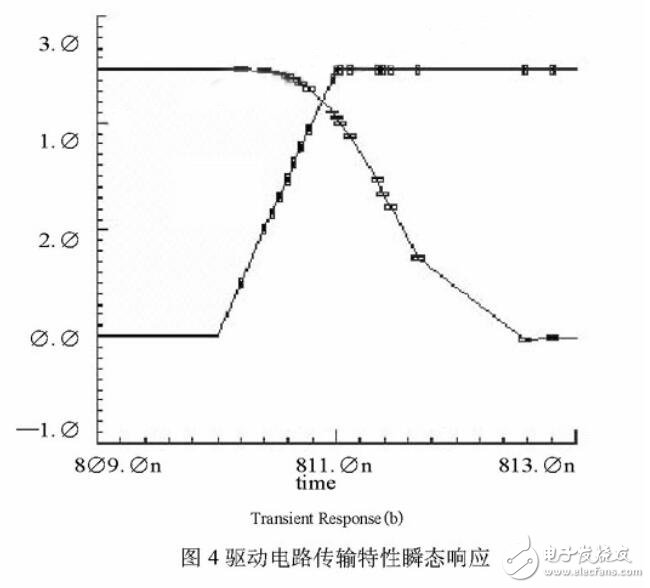
驱动电路的传输特性瞬态响应在图4中给出。其中(a)为上升沿瞬态响应,(b)为下降沿瞬态响应。从图4中可以看出,驱动电路上升沿明显分为了三个部分,分别对应三个上拉驱动管起主导作用的时期。1阶段为Q1、N4共同作用,输出电压迅速抬升,2阶段为N4起主导作,使输出电平达到VDD,3阶段为P5起主导作用,维持输出高电平为VDD。而且还可以缩短上升时间,下降时间满足工作频率在兆赫兹级以上的要求。
需要注意的问题及仿真结果
电容Cboot的大小的确定
Cboot的最小值可以按照以下方法确定。在预充电周期内,电容Cboot 上的电荷为VDDCboot 。在A点的寄生电容(计为CA)上的电荷为VDDCA。因此在预充电周期内,A点的总电荷为
Q_{A1}=V_{DD}C_{boot}+V_{DD}C_{A} (1)
B点电位为GND,因此在B点的寄生电容Cpar上的电荷为0。
在自举升压周期,为了使OUT端电压达到VDD,B点电位最低为VB=VDD+Vthn。因此在B点的寄生电容Cpar上的电荷为
Q_{B}=(V_{DD}+V_{thn})Cpar (2)
忽略MOS管P4源漏两端压降,此时Cboot上的电荷为VthnCboot ,A点寄生电容CA的电荷为(VDD+Vthn)CA。A点的总电荷为
QA2=V_{thn}C_{BOOT}+(V_{DD}+V_{thn})C_{A} (3)
同时根据电荷守恒又有
Q_{B}=Q_{A}-Q_{A2} (4)
综合式(1)~(4)可得
C_{boot}=\frac{V_{DD}+V_{thn}}{v_{DD}-v_{thn}}Cpar+\frac{v_{thn}}{v_{DD}-v_{thn}}C_{A}=\frac{V_{B}}{v_{DD}-v_{thn}}Cpar+\frac{V_{thn}}{v_{DD}-v_{thn}}C_{A} (5)
从式(5)中可以看出,Cboot随输入电压变小而变大,并且随B点电压VB变大而变大。而B点电压直接影响N4的导通电阻,也就影响驱动电路的上升时间。因
- 电容降压LED驱动电路(06-24)
- 新型大功率蓝光LED光源驱动电路设计(08-03)
- 电动自行车控制器MOSFET驱动电路的设计(11-18)
- 两种常见的MOSFET驱动电路设计(12-02)
- 大功率LED恒流驱动电路的设计实例(06-06)
- 高频逆变电源的保护与驱动电路的设计(06-26)