机器人杀人事件的终结者 打造安全的机器人解决方案
全球诸多国家近半个世纪工业机器人的使用实践表明,高效精准的机器人是工业发展的福音,工业机器人自动化生产线成套设备将成为自动化装备的主流及未来发展方向。而日前,德国大众工厂内发生的一起"机器人杀人"事件,迅速引发了关于人工智能和机器人应用的热议,人类陷入了对机器人安全性的质疑和恐慌之中。
事件回顾
据《金融时报》报道,7月1日,在大众汽车德国卡塞尔工厂中,一名工作人员在调试固定机器人时受到撞击,被机器人重压在金属板上不幸身亡。事故初步断定是人为操作失误造成,并非机器人的问题。

人工智能安全性引质疑
原文报道对此的解释是一起普通的工业事故,但人们似乎对这样的说法很不买账——被赋予自动化和人工智能的机器人居然不能识别人类和工业品,偶然的失误竟会导致人类成为牺牲品?!
面对人机协作的日益所趋,机器人已经不局限在封闭的区域内工作,它们逐渐可以在公开区域和人们并肩协作。如何确保机器人不对与其一起工作的人类造成伤害?此次德国大众"机器人杀人"事件无疑敲响了人机安全的警钟。

"人机协作是人和机器人相互合作,高度安全并智能规避对人类伤害的机器人是协作顺利展开的基本前提。"汇川技术机器人产品线负责人如是说。
秉承着对高安全规格的一贯追求,在工业机器人的探索道路上,汇川技术致力于提供机器人核心零部件及综合解决方案。安全性的设计自顶向下,由内而外,从部件到整机,软硬兼顾,根植于系统的方方面面,为广大用户提供真正意义上高度安全的机器人控制系统解决方案。

(一)电气方案是安全机器人之基石
工业机器人的电气方案主要包含机器人控制系统、伺服驱动、伺服电机及各种传感器,汇川技术从工业机器人控制系统、高性能伺服系统以及工业视觉三个方面各个击破,打造全面安全的电气解决方案。

1.IMC100($0.0952)机器人控制系统:高度智能的大脑
作为工业机器人运动和现场工艺的载体,IMC100控制器好比一个高度智能的中央大脑。其高速实时的EtherCAT设计方案,主站同步周期达125us,抖动时间小于±0.04us,可快速响应现场故障;多自由度机器人动力学解耦控制,直接控制电机电流,使机器人运行更加安全。
2.IS620N伺服系统:强劲的心脏+敏感的神经
ISMH系列伺服电机提供3-4倍的过载能力;其实时惯量辨识、摩擦力辨识功能及多种滤波器设计,足以帮助机器人面对各种复杂环境,保证全程安全运行。
3.工业视觉:智能识别 高精度无误检测
汇川技术工业视觉系统涵盖高动态图像合成技术,支持客户实现高端视觉应用开发。分拣类软件Sort采用人类视觉仿真的智能识别模型,从图像采集到智能分类,保证机器人做到无误判分拣,有效避免对工作人员的"误伤"。
(二)将安全技术深化到机器人的方方面面
安全技术是保证设备正常运行的必要条件。在当前人机协作的大趋势下,工业机器人的工作已然不再是与人类隔离作业,而是越来越多地直接参与并协助人类工作,因此安全技术应该是工业机器人从业设计人员必须要攻克的技术。
为推动产业升级,打造真正与人和谐工作的工业机器人解决方案,我们着重进行了如下设计。
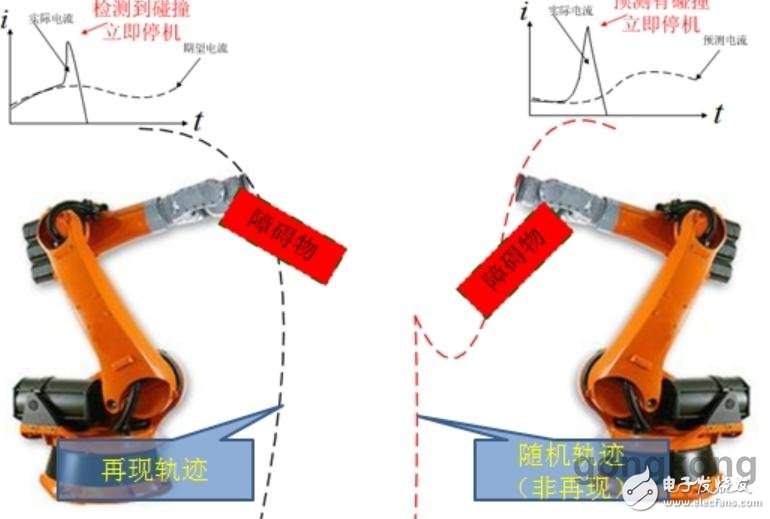
1.自主碰撞检测
汇川技术的机器人产品可在任何运动时刻监测是否有碰撞发生。基于自动学习功能,在线监测与诊断重复轨迹是否发生碰撞;基于动力学模型控制,主动预估非重复轨迹是否发生碰撞;同时可实现在机器人故障、撞击情况下的力矩及速度限制,最终实现安全停机。
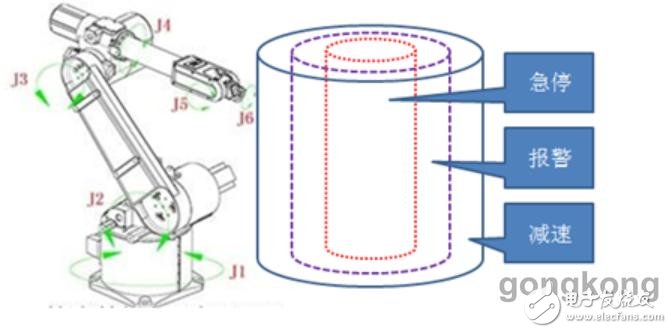
2.安全区域和障碍物自动规避
安全区域是机器人工作区域和运行速度的安全保护措施,用户可根据应用场合设定不同等级的安全区域(急停区域、报警区域、减速区域),当机器人进入设定的区域后机器人控制系统将会有相应的安全防护措施。 汇川技术的机器人产品能做到:
a)根据仿真软件实现将设备周边的障碍物设计入机器人运动区域,形成干涉区域;
b)提供3D视觉识别技术,识别加工工件外形、轨迹等,同时识别和提取非工作区和路径的特征,形成干涉区域;
c)可实现机器人因故障、撞击等原因停机之后,在安全速度、安全力矩等条件下重新启动机器人并安全地回归原点,降低人为操作难度。
3.可灵活配置的安全接口
根据现场实际需求,灵活配置安全接口,支持光栅信号安全接口、安全门信号安全接口、三位使能开关安全接口、双位复位安全接口等安全防呆信号接口。机器人控制系统可根据配置的安全接口信号反馈做出相应的安全防护措施。
a)伺服驱动模块提
- 盘点:那些为健康而生的APP与智能硬件(11-24)
- 指尖的密码!手指静脉识别鼠标问世(02-02)
- WLAN射频优化的解决方案设计详解(03-03)
- 智能鞋垫:解决跑步者的膝伤问题(02-12)
- 混合动力汽车系统结构大盘点TOP3(03-14)
- 盘点STM32-NUCLEO开发与仿真平台(03-28)