经典巡线机器人电源系统研究
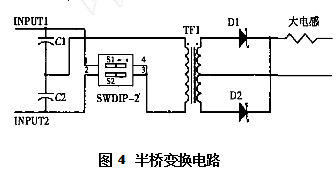
10脚为低电平,BG4、BG7导通。变压器TF1流过正向电流。变压器TF1一次绕组上的电压为反向,大小为从整流桥过来的总电压的一半,如图5所示。
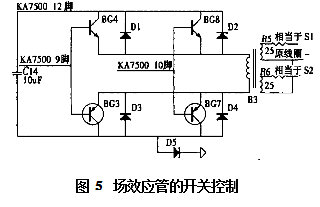
10脚输出高电平时,9脚为低电平,BG8、BG3 导通。变压器TF1流过反向电流。变压器TF1一 次绕组上的电压为正向,大小同样为从整流桥过来的总电压的一半。
4.2.2充电控制电路
设计的充电电路须在电压至峰值电压时,停止 充电,以防电池过充电;并且在充电快完成时,应使用C/102C/15进行补充充电,以防止由于电池的弱极化。 充电使能电路如图6所示,SR24是继电器,CTL+,CTL-连接到线圈的输出端,78L15为运放提供稳定的15V电源。使能电路的核心是CA3140,本电路不能采用开环比较器电路,因为,镍 氢电池在充电时也要工作,其 dv dt 的特性可能变化很大,ca3140接成schmitt触发器的形式。
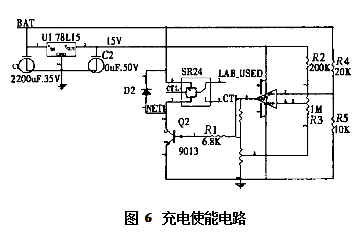
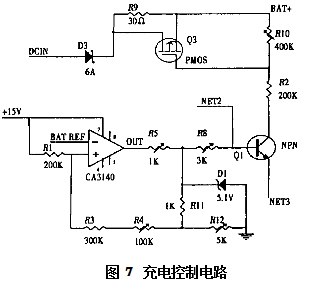
图7是充电控制电路,由CA3140组成schmitt 触发器,稳压管的主要作用是稳定输出电压的幅值,为三极管提供合适工作点。R5是保护电阻,起限流作用。两个光隔,分别用于强制快充使能端和快速充电检测,为机器人提供充电信息。
机器人过障时电机提供的功率较大,充电电流可能小于放电电流,为避免电池的过放电而损坏电池,设计的保护电路,如图8所示。

当蓄电池两端电压低于24V时,由于稳压管的 非线性,三级管Q1基极的电位趋于0,Q1反相截止,电流经R5,D2流入光隔D3,产生LOW信号,提示机器人停机充电。当蓄电池电压高于24V时,则Q1导通,电流由R5流入三极管Q1。
机器人需要输出32V,7A;24V,4A;12V,3A;5V,2A四路电压,选用DC/DC模块电源,把电池输 出端的电压转换成以上四种电压。
5结论
本文对机器人电源系统进行了理论分析和实际设计,主要阐述了感应取电装置各参数(铁芯磁性参数、几何尺寸、线圈匝数等)对取电功率的影响,从理论上推出他们之间的关系,根据理论分析结果,进行了相应的试验;同时,对电源系统的控制电路及充电电路工作原理进行详细的介绍。本系统研制,对于高压作业设备的电能供给问题,是一个很好的 解决方案。
更多机器人技术资料,电路图及DIY设计,可参见本期Designs of week——当中国制造遇上机器人技术,设计思维请跟上!

- 机器人关键技术及前沿应用设计集锦(10-24)
- 应用于车身传输领域的机器人技术(10-21)
- 机器人技术科普之必知工业机器人分类(10-20)
- 伺服控制智能助力机械手系统功能分析(10-21)
- 实时语音识别系统在家庭监护机器人的实现(11-16)
- 中国机器人现状:核心技术缺失 ,与人共融成突破点(02-28)