基于X25045的新型看门狗电路
看门狗(Watchdog)电路是嵌入式系统需要的抗干扰措施之一。本文用X25045芯片设计了一种新的看门狗电路,具有体积小、占用I/O口线少和编程方便的特点,可广泛应用于仪器仪表和各种工控系统中。
前言
工控系统在运行时,通常都会遇到各种各样的现场干扰,抗干扰能力是衡量工控系统性能的一个重要指标。看门狗(Watchdog)电路是自行监测系统运行的重要保证,几乎所有的工控系统都包含看门狗电路。在8096系列单片机和增强型8051系列单片机中,该系统已经做在芯片内部,用户只要用软件开放它就可以,使用很方便。但目前工控系统仍在使用廉价的普通型8051系列单片机,则看门狗电路必须由用户自己建立。
看门狗电路一般有软件看门狗和硬件看门狗两种。软件看门狗不需外接硬件电路,但系统需要出让一个定时器资源,这在许多系统中很难办到,而且若系统软件运行不正常,可能导致看门狗系统也瘫痪。硬件看门狗是真正意义上的"程序运行监视器",如计数型的看门狗电路通常由555多谐振荡器、计数器以及一些电阻、电容等组成,分立元件组成的系统电路较为复杂,运行不够可靠。
X25045芯片简介
X25045是美国Xicor公司的生产的标准化8脚集成电路,它将EEPROM、看门狗定时器、电压监控三种功能组合在单个芯片之内,大大简化了硬件设计,提高了系统的可靠性,减少了对印制电路板的空间要求,降低了成本和系统功耗,是一种理想的单片机外围芯片。X25045引脚如图1所示。
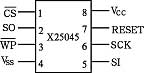
图1 X25045引脚图
其引脚功能如下。
CS:片选择输入;
SO:串行输出,数据由此引脚逐位输出;
SI:串行输入,数据或命令由此引脚逐位写入X25045;
SCK:串行时钟输入,其上升沿将数据或命令写入,下降沿将数据输出;
WP:写保护输入。当它低电平时,写操作被禁止;
Vss:地;
Vcc:电源电压;
RESET:复位输出。
X25045在读写操作之前,需要先向它发出指令,指令名及指令格式如表1所示。
表1 X25045指令及其含义
X25045看门狗电路设计及编程
X25045硬件连接图如图2所示。X25045芯片内包含有一个看门狗定时器,可通过软件预置系统的监控时间。在看门狗定时器预置的时间内若没有总线活动,则X25045将从RESET输出一个高电平信号,经过微分电路C2、R3输出一个正脉冲,使CPU复位。图2电路中,CPU的复位信号共有3个:上电复位(C1、R2),人工复位(S、R1、R2)和Watchdog复位(C2、R3),通过或门综合后加到RESET端。C2、R3的时间常数不必太大,有数百微秒即可,因为这时CPU的振荡器已经在工作。
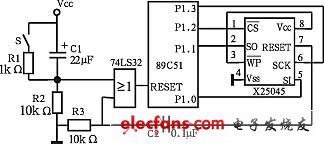
图2 X25045看门狗电路硬件连接图
看门狗定时器的预置时间是通过X25045的状态寄存器的相应位来设定的。如表2所示,X25045状态寄存器共有6位有含义,其中WD1、WD0和看门狗电路有关,其余位和EEPROM的工作设置有关。

表2 X25045状态寄存器
WD1=0,WD0=0,预置时间为1.4s。
WD1=0,WD0=1,预置时间为0.6s。
WD1=1,WD0=0,预置时间为0.2s。
WD1=1,WD0=1,禁止看门狗工作。
看门狗电路的定时时间长短可由具体应用程序的循环周期决定,通常比系统正常工作时最大循环周期的时间略长即可。编程时,可在软件的合适地方加一条喂狗指令,使看门狗的定时时间永远达不到预置时间,系统就不会复位而正常工作。当系统跑飞,用软件陷阱等别的方法无法捕捉回程序时,则看门狗定时时间很快增长到预置时间,迫使系统复位。
以下是C语言编写的看门狗程序部分。
#include "reg51.h"
sbit cs=P1^2;/*片选信号由P1.2产生*/
sbit sck=P1^3; /*时钟信号由P1.3 产生*/
sbit si=P1^0; /*SI由P1.0产生*/
sbit so=P1^1; /*SO由P1.1产生*/
sbit c=ACC^7; /*定义位变量*/
bdata unsigned char com;
void tran() /*发送一字节数据子函数*/
{
unsigned char i;
for(i=0; i《8; i++)
{ ACC=com; /*将数据放入a中*/
si=c;
sck=0; /*sck产生一个上跳变*/
sck=1;
com=com《《1; /*左移一位*/
}
return;
}
main()
{
com=0x06; /*发写读使能命令*/
cs=0;
tran();
cs=1;
com=0x01; /*发写状态字命令*/
cs=0;
tran();
com=0x00; /*定时1.4s*/
tran();
cs=1;
。..;系统正常运行的程序部分
}
需要注意的是,在程序正常运行的时候,应该在适当的地方加一条喂狗指令,使系统正常运行时的定时时间达不到预置时间。系统就不会复位。喂狗指令如下。
main()
{
。..;系统正常运行的程序部分
{
- C51单片机看门狗电路(02-14)
- 基于Xilinx(赛灵思) CPLD的看门狗电路设计(10-09)
- stm32看门狗时间计算 独立看门狗和窗口看门狗的特性是什么(09-10)
- 嵌入式系统开发的流程和提升可靠性的七大技巧(03-19)
- 看门狗定时器的设计、工作原理及看门狗定时器的操作(04-23)
- pic18单片机在BootLoader中的应用(06-03)