单片机4×4矩阵键盘设计方案
1、设计原理
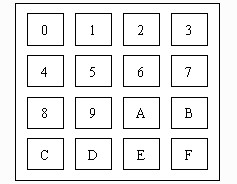
(1)如图14.2所示,用单片机的并行口P3连接4×4矩阵键盘,并以单片机的P3.0-P3.3各管脚作输入线,以单片机的P3.4-P3.7各管脚作输出线,在数码管上显示每个按键 "0-F"的序号。
(2)键盘中对应按键的序号排列如图14.1所示。
2、参考电路
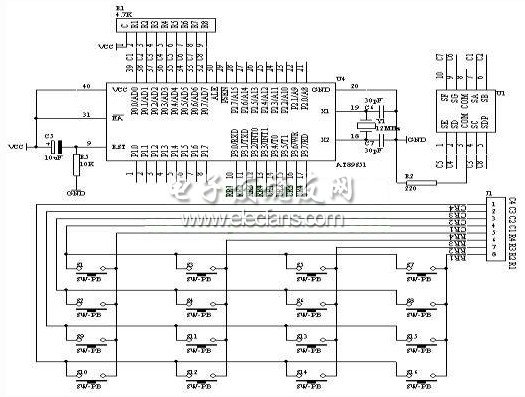
图14.2 4×4矩阵式键盘识别电路原理图
3、电路硬件说明
(1)在"单片机系统"区域中,把单片机的P3.0-P3.7端口通过8联拨动拨码开关JP3连接到"4×4行列式键盘"区域中的M1-M4,N1-N4端口上。
(2)在"单片机系统"区域中,把单片机的P0.0-P0.7端口连接到"静态数码显示模块"区域中的任何一个a-h端口上;要求:P0.0对应着a,P0.1对应着b,……,P0.7对应着h。
4、程序设计内容
(1)4×4矩阵键盘识别处理 。
(2)每个按键都有它的行值和列值,行值和列值的组合就是识别这个按键的编码。矩阵的行线和列线分别通过两并行接口和CPU通信。键盘的一端(列线)通过电阻接VCC,而接地是通过程序输出数字"0"实现的。键盘处理程序的任务是:确定有无键按下,判断哪一个键按下,键的功能是什么?还要消除按键在闭合或断开时的抖动。两个并行口中,一个输出扫描码,使按键逐行动态接地;另一个并行口输入按键状态,由行扫描值和回馈信号共同形成键编码而识别按键,通过软件查表,查出该键的功能。
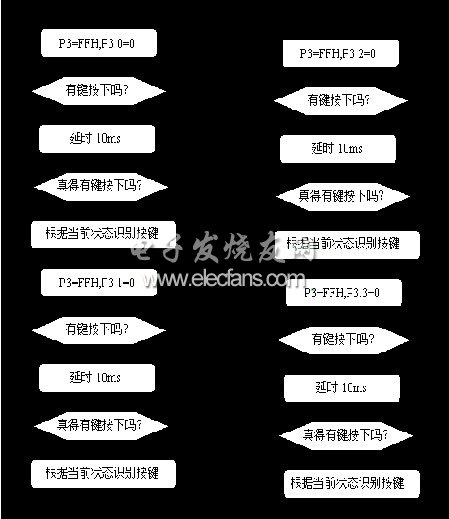
5、程序流程图(如图14.3所示)
6、汇编源程序
;;;;;;;;;;定义单元;;;;;;;;;;
COUNT EQU 30H
;;;;;;;;;;入口地址;;;;;;;;;;
ORG 0000H
LJMP START
ORG 0003H
RETI
ORG 000BH
RETI
ORG 0013H
RETI
ORG 001BH
RETI
ORG 0023H
RETI
ORG 002BH
RETI
;;;;;;;;;;主程序入口;;;;;;;;;;
ORG 0100H
START: LCALL CHUSHIHUA
LCALL PANDUAN
LCALL XIANSHI
LJMP START
;;;;;;;;;;初始化程序;;;;;;;;;;
CHUSHIHUA: MOV COUNT,#00H
RET
;;;;;;;;;;判断哪个按键按下程序;;;;;;;;;;
PANDUAN: MOV P3,#0FFH
CLR P3.4
MOV A,P3
ANL A,#0FH
XRL A,#0FH
JZ SW1
LCALL DELAY10MS
JZ SW1
MOV A,P3
ANL A,#0FH
CJNE A,#0EH,K1
MOV COUNT,#0
LJMP DK
K1: CJNE A,#0DH,K2
MOV COUNT,#4
LJMP DK
K2: CJNE A,#0BH,K3
MOV COUNT,#8
LJMP DK
K3: CJNE A,#07H,K4
MOV COUNT,#12
K4: NOP
LJMP DK
SW1: MOV P3,#0FFH
CLR P3.5
MOV A,P3
ANL A,#0FH
XRL A,#0FH
JZ SW2
LCALL DELAY10MS
JZ SW2
MOV A,P3
ANL A,#0FH
CJNE A,#0EH,K5
MOV COUNT,#1
LJMP DK
K5: CJNE A,#0DH,K6
MOV COUNT,#5
LJMP DK
K6: CJNE A,#0BH,K7
MOV COUNT,#9
LJMP DK
K7: CJNE A,#07H,K8
MOV COUNT,#13
K8: NOP
LJMP DK
SW2: MOV P3,#0FFH
CLR P3.6
MOV A,P3
ANL A,#0FH
XRL A,#0FH
JZ SW3
LCALL DELAY10MS
JZ SW3
MOV A,P3
ANL A,#0FH
CJNE A,#0EH,K9
MOV COUNT,#2
LJMP DK
K9: CJNE A,#0DH,KA
MOV COUNT,#6
LJMP DK
KA: CJNE A,#0BH,KB
MOV COUNT,#10
LJMP DK
KB: CJNE A,#07H,KC
MOV COUNT,#14
KC: NOP
LJMP DK
SW3: MOV P3,#0FFH
CLR P3.7
MOV A,P3
ANL A,#0FH
XRL A,#0FH
JZ SW4
LCALL DELAY10MS
JZ SW4
MOV A,P3
ANL A,#0FH
CJNE A,#0EH,KD
MOV COUNT,#3
LJMP DK
KD: CJNE A,#0DH,KE
MOV COUNT,#7
LJMP DK
KE: CJNE A,#0BH,KF
MOV COUNT,#11
LJMP DK
KF: CJNE A,#07H,KG
MOV COUNT,#15
KG: NOP
LJMP DK
SW4: LJMP PANDUAN
DK: RET
;;;;;;;;;;显示程序;;;;;;;;;;
XIANSHI: MOV A,COUNT
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
LCALL DELAY
SK: MOV A,P3
ANL A,#0FH
XRL A,#0FH
JNZ SK
RET
;;;;;;;;;;10ms延时程序;;;;;;;;;;
DELAY10MS: MOV R6,#20
D1: MOV R7,#248
DJNZ R7,$
DJNZ R6,D1
RET
;;;;;;;;;;200ms延时程序;;;;;;;;;;
DELAY: MOV R5,#20
LOOP: LCALL DELAY10MS
DJNZ R5,LOOP
RET
;;;;;;;;;;共阴码表;;;;;;;;;;
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H
DB 7FH,6FH,77H,7CH,39H,5EH,79H,71H
;;;;;;;;;;结束标志;;;;;;;;;;
END
7、C语言源程序
#include
unsigned char code table[]={0x3f,0x66,0x7f,0x39,
0x06,0x6d,0x6f,0x5
- 矩阵键盘原理与结构(09-25)
- C51单片机矩阵键盘扫描去抖程序(09-25)
- 基于RS232行列式矩阵键盘接口的设计方案(02-21)
- 矩阵键盘实现16个按键操作原理及应该方案(08-08)
- 单片机在电源设计中的应用(06-07)
- 基于单片机的锅炉液位控制装置设计(07-22)