基于MEMS加速度计的振动监控解决方案
带宽)内的变化。利用图3和图5中的ADXL356仿真,1000 Hz时的平坦度约为17%,2000 Hz时的平坦度约为40%。
虽然许多应用由于平坦度(精度)要求而需要限制可以使用的带宽,但对有些应用来说,这可能不是问题。例如,某些应用可能更注重跟踪随时间的相对变化,而不是绝对精度。另一个例子是利用数字后处理技术来消除用户最关心的频率范围上的纹波。对于此类情况,在给定频率范围时,响应的可重复性和稳定性常常比响应的平坦度更重要。
测量范围
MEMS加速度计的测量范围指标表示传感器的输出信号可以跟踪的最大线性加速度。在超出额定测量范围的线性加速度水平,传感器的输出信号会饱和。这种情况会引起严重失真,导致难以(甚至无法)从测量结果提取有用信息。因此,必须确保MEMS加速度计能够支持峰值加速度水平(参见图2中的AMAX)。
注意,测量范围与频率有一定的关系,因为传感器的机械响应会引入某种响应增益,增益响应的峰值出现在谐振频率时。对于ADXL356的仿真响应(参见图3),增益峰值约为4倍,故测量范围从±40 g降至±10 g。等式6提供了一种分析方法来预测此值,它以等式5为出发点:
比例因子的大幅变化和测量范围的降低,是大多数CBM系统希望将其遭受的最大振动频率限制在远低于传感器谐振频率水平的两个原因。
分辨率
仪器分辨率可定义为环境中引起仪器示数发生可检测变化的最小值。"1在振动检测节点中,加速度测量的噪声会直接影响其检测振动变化的能力(即"分辨率")。因此,对于那些正在考虑利用MEMS加速度计检测其机器平台上微小振动变化的人来说,噪声行为是一个重要考虑因素。等式7提供了一个用于量化MEMS加速度计噪声对其分辨微小振动变化能力的影响的简单关系式。在该模型中,传感器的输出信号(yM)等于其噪声(aN)与其经受的振动(aV)之和。因为噪声(aN)与振动(aV)没有相关性,所以传感器输出信号的幅度(|yM|)等于噪声幅度(|aN|)与振动幅度(|aV|)的和方根(RSS)。

那么,需要何种振动水平才能克服测量中的噪声负担,在传感器输出信号中产生可观测的响应?根据噪声水平量化振动水平有助于以分析方式探究这个问题。等式8通过比率(KVN)确定了这一关系,然后根据该比率导出了一个预测传感器输出变化水平的关系:
表1提供了此关系的一些数值例子,以帮助说明传感器输出测量结果相对于振动与噪声幅度之比(KVN)的增加。为简明起见,本文剩余部分假设传感器测量的总噪声决定其分辨率。从表1可知,这对应于KVN为1的情况,即振动幅度等于噪声幅度。在这种情况下,传感器的输出幅度相对于零振动时的输出幅度会增加42%。注意,为了确定该情况下分辨率的相关定义,每种应用可能需要考虑系统中可观测到何种水平的增加。

预测传感器噪声
图4显示了一个采用MEMS加速度计的振动检测节点的简化信号链。大多数情况下,低通滤波器会提供某种抗混叠支持,而数字处理会提供更明确的频率响应边界。一般而言,这些数字滤波器会努力保护代表实际振动的信号内容,同时将带外噪声的影响降至最低。因此,当估计噪声带宽时,数字处理是系统中要考虑的影响最大的部分。此类处理可采用时域技术,例如带通滤波器,或采用频谱技术,例如快速傅里叶变换(FFT)。
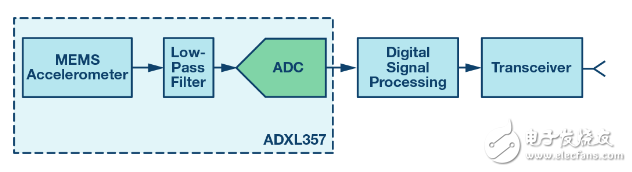
图4.振动检测节点信号链
等式9提供了一个用于估计MEMS加速度计测量总噪声(ANOISE)的关系式,其中使用了噪声密度(φND)和与信号链相关的噪声带宽(fNBW)。

利用等式9中的关系,我们可以估计:当对ADXL357(噪声密度为80 μg/√Hz)使用噪声带宽为100 Hz的滤波器时,总噪声将为0.8 mg (rms)。
用速度衡量振动
某些CBM应用需要用线速度来衡量核心加速度特性(范围、带宽、噪声)。进行这种转换的一种方法是从图1所示简单模型开始,并使用同样的假设:线性运动、单一频率和零平均位移。等式10通过图1中物体瞬时速度(vV)的数学关系式表述了该模型。此速度的幅度(表示为均方根rms)等于峰值速度除以√2。
等式11对此关系求导,得出图1中物体瞬时加速度的关系式:
从等式11中加速度模型的峰值出发,等式12导出了加速度幅度(Arms)与速度幅度(Vrms)和振动频率(fv)的新关系式。
案例研究
现在以ADXL357为例进行研究,将上述内容汇总起来,用线速度表示其范围(峰值)和1 Hz至1000 Hz振动频率范围内的分辨率。图5提供了对本案例有影响的多个特性的图形定义,从ADXL357噪声密度相对
- MEMS振动监控系统设计简介(08-05)
- Ka 波段下90°分布式MEMS 移相器的优化设计(04-02)
- MEMS加速度计在声学拾音器中的应用(09-30)
- MEMS光开关性能与发展(10-24)
- 汽车上都有哪些mems应用(11-28)
- MEMS加速度传感器在胎儿心率检测仪中的应用(11-19)