深度解析多传感器融合技术
多传感器融合又称多传感器信息融合,有时也称作多传感器数据融合,于1973年在美国国防部资助开发的声纳信号处理系统中被首次提出,它是对多种信息的获取、表示及其内在联系进行综合处理和优化的技术。
随着机器人技术的不断发展,机器人的应用领域和功能有了极大的拓展和提高。智能化已成为机器人技术的发展趋势,而传感器技术则是实现机器人智能化的基础之一。由于单一传感器获得的信息非常有限,而且,还要受到自身品质和性能的影响,因此,智能机器人通常配有数量众多的不同类型的传感器,以满足探测和数据采集的需要。若对各传感器采集的信息进行单独、孤立地处理,不仅会导致信息处理工作量的增加,而且,割断了各传感器信息间的内在联系,丢失了信息经有机组合后可能蕴含的有关环境特征,造成信息资源的浪费,甚至可能导致决策失误。为了解决上述问题人们提出了多传感器融合技术(mulTI-sensorfusion)。
概述
多传感器融合又称多传感器信息融合(mulTI-sensor informaTIon fusion),有时也称作多传感器数据融合(mulTI-sensor data fusion),于1973年在美国国防部资助开发的声纳信号处理系统中被首次提出,它是对多种信息的获取、表示及其内在联系进行综合处理和优化的技术。它从多信息的视角进行处理及综合,得到各种信息的内在联系和规律,从而剔除无用的和错误的信息,保留正确的和有用的成分,最终实现信息的优化,也为智能信息处理技术的研究提供了新的观念。
多传感器融合的层次结构
多传感器融合在结构上按其在融合系统中信息处理的抽象程度,主要划分为三个层次:数据层融合、特征层融合和决策层融合。 看飞机太伤肾,男子看航展憋尿憋出内伤
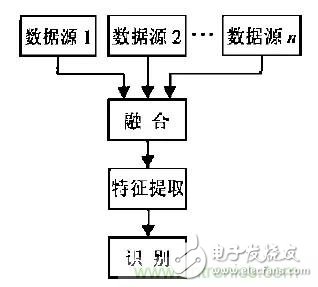
1.数据层融合:也称像素级融合,首先将传感器的观测数据融合,然后从融合的数据中提取特征向量,并进行判断识别。数据层融合需要传感器是同质的(传感器观测的是同一物理现象),如果多个传感器是异质的(观测的不是同一个物理量),那么数据只能在特征层或决策层进行融合。数据层融合不存在数据丢失的问题,得到的结果也是最准确的,但计算量大,且对系统通信带宽的要求很高。
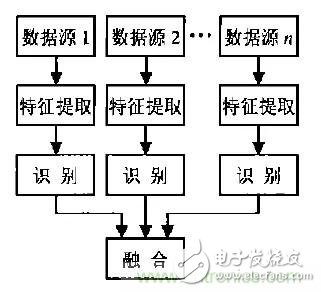
2.特征层融合:特征层融合属于中间层次,先从每种传感器提供的观测数据中提取的有代表性的特征,这些特征融合成单一的特征向量,然后运用模式识别的方法进行处理。这种方法的计算量及对通信带宽的要求相对降低,但由于部分数据的舍弃使其准确性有所下降。

3.决策层融合:决策层融合属于高层次的融合,由于对传感器的数据进行了浓缩,这种方法产生的结果相对而言最不准确,但它的计算量及对通信带宽的要求最低。
对于特定的多传感器融合系统工程应用,应综合考虑传感器的性能、系统的计算能力、通信带宽、期望的准确率以及资金能力等因素,以确定哪种层次是最优的。另外,在一个系统中,也可能同时在不同的融合层次上进行融合。


多传感器融合的算法
融合算法是融合处理的基础。它是将多元输入数据根据信息融合的功能要求,在不同融合层次上采用不同的数学方法,对数据进行综合处理,最终实现融合。目前已有大量的融合算法,它们都有各自的优缺点。这些融合算法总体上法可以分为三大类型:嵌入约束法、证据组合法、人工神经网络法。
1.嵌入约束法
由多种传感器所获得的客观环境的多组数据就是客观环境按照某种映射关系形成的像,传感器信息融合就是通过像求解原像,即对客观环境加以了解。用数学语言描述就是,即使所有传感器的全部信息,也只能描述环境的某些方面的特征,而具有这些特征的环境却有很多,要使一组数据对应惟一的环境(即上述映射为一一映射),就必须对映射的原像和映射本身加约束条件,使问题能有惟一的解。嵌入约束法有两种基本的方法:贝叶斯估计和卡尔曼滤波。
2.证据组合法
证据组合法认为完成某项智能任务是依据有关环境某方面的信息做出几种可能的决策,而多传感器数据信息在一定程度上反映环境这方面的情况。因此,分析每一数据作为支持某种决策证据的支持程度,并将不同传感器数据的支持程度进行组合,即证据组合,分析得出现有组合证据支持程度最大的决策作为信息融合的结果。
证据组合法是为完成某一任务的需要而处理多种传感器的数据信息。它先对单个传感器数据信息每种可能决策的支持程度给出度量(即数据信息作为证据对决策的支持程度),再寻找一种证据组合方法或规则,使在已知两个不同传感器数据(即证据)对决策的分别支持程度时,
- 先进手术系统所需的独特电源需求,凌力尔特来接招(10-11)
- 3G/WIFI控制太阳能驱动机器人制作详解(10-28)
- 超声波移动机器人导航设计方法(04-11)
- ROCKWELL系统在机器人汽车焊装线上的应用(07-07)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 基于DSP和机器人的声控系统设计与实现(02-21)