智能机器人四大分类详细说明
(4)服务智能机器人
机器人技术不仅在工农业生产、科学探索中得到了广泛应用,也逐渐渗透到人们的日常生活领域,服务机器人就是这类机器人的一个总称。尽管服务机器人的起步较晚,但应用前景十分广泛,目前主要应用在清洁、护理、执勤、救援、娱乐、和代替人对设备维护保养等场合。国际机器人联合会给服务机器人的一个初步定义是,一种以自主或半自主方式运行,能为人类的生活、康复提供服务的机器人,或者是能对设备运行进行维护的一类机器人。
一种基于服务机器人的视觉系统设计
本系统在设计上采用CMOS图像传感器代替CCD类型传感器进行采集图像,DSP处理芯片TMS320VC5509A($19.6500)进行图像处理以及作为CPU 控制,在设计过程中,为了直观显现机器人视觉系统识别和跟踪的效果,专门采用了一个TFT格式的液晶来直观显示。软件上,采用了一部分足球机器人的视觉技 术来达到对目标的快速识别,通过全局的特征矩构建的雅可比矩阵达到对目标的自适应跟踪。
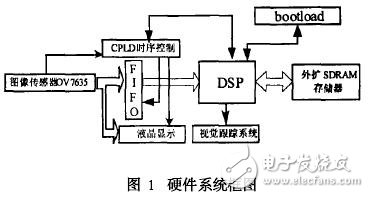
1 硬件部分设计
图1为系统硬件电路的功能模块框图。
1.1 图像采集
视觉镜头把外部的图像信息成像在图像传感器的面阵单元上。目前流行的图像传感器有面阵CCD(Charged Coupled Device,电荷耦合器件)型和面阵CMOS两种。相比较CCD型的图像传感器,CMOS图像传感器的有源像素单元为每一个像素提供了放大器,只需一个 单供电低逻辑电平电压,功耗只相当于CCD的十分之一。CMOS图像传感器内部集成了A/D转换部分,直接输出数字信号。基于这些因素,本系统采用了 Omnivision公司推出的CMOS彩色图像传感器OV7635。
OV7635的分辨力为640X480,能输出3种格式的8位数据:YCbCr4:2:2模式、RGB4:2:2模式和RGB原始数据模式。输出 VGA格式最大可达到30fps(fps:每秒帧数)。能工作在逐行扫描下和隔行扫描下。OV7635有主模式和从模式两种工作模式。在主模式下,同步信 号和时钟不由外围设备控制。在从模式下,OV7635的场同步信号VSYNC,行同步信号HREF以及系统的晶振频率XCLK均由外部设备控制。本系统采 用的是主模式。OV7635通过I2C总线配置片内寄存器,使其输出原始数据。系统上电复位后,由DSP芯片的I2C总线信号对CMOS寄存器初始化。然 后OV7635就按要求输出图像信号。包括行同步信号HREF,场同步信号VSYNC,像素时钟信号PCLK,数字图像信号。
1.2 液晶显示
为了很直观的看到视觉系统对人的识别和跟踪效果,采用了一片INNOLUX公司的PT035TN01液晶显示屏。为了不增加对DSP的负担,同时也为 了实时看到对外界目标物体的跟踪效果,液晶显示的数据不经由DSP,直接通过传感器OV7635输出的图像数据信号和CPLD控制时序来进行显示。 PT035TN01是3.5英寸TFT格式的液晶,分辨力为320×3(RGB)×240,液晶IF1、IF2两输入控制脚对输入的数据格式进行选择:串 行RGB格式、CCIR601格式、CCIR656格式。液晶的扫描模式有4种。本视觉系统采用的输入数据格式是CCIR601格式,扫描模式为由上到下 和左到右的扫描模式。
在CCIR601格式下,图像传感器输出的像素时钟PCLK通过CPLD二分频作为液晶的工作时钟,图像传感器输出的行同步信号HREF经过CPLD 的处理后作为液晶的行同步信号HIS,这样,在CPLD控制下,图像传感器OV7635输出的数据信号送入液晶中进行显示。
1.3 时序控制
OV7635输出的场同步信号VSYNC,行同步信号HREF以及像素时钟信号PCLK接至CPLD芯片,产生控制信号把OV7635输出的数据信号 存入FIFO帧存储器AL422B中,以及产生液晶的时钟和行同步信号控制液晶的显示。CPLD采用了ALTERA公司的EPM7064($8.2800)芯片。在CPLD 中完成了对FIFO的写控制、通知DSP读信号、液晶的时钟信号的产生等功能。
CPLD接收场同步信号VSYNC,此信号的下降沿表示图像传感器输出一帧的开始,此时CPLD产生WRST负脉冲复位FIFO的写指针。场同步信号 VSYNC下降沿后,判断行同步信号HREF的上升沿到来,接着利用像素时钟信号PCLK作为写时钟WCK将图像数据直接存储到FIFO中,当存到一定的 数后,就及时发信号给DSP,以便DSP读取数据,本系统采用的是一个中断INT0来通知DSP。此时DSP可以读数据也可以不读,视处理的速度来定。读 数据时,可利用RD和片选,产生RCK信号。DSP读取的速度不能太快,以读取速度小于写速度为原则。
在对液晶的逻辑时序控制上,由于图像输出的信号是640×480的像素,而液晶的显示为320×240的格式。所以利用CPLD把图像传感器输入的像 素时钟信号PCLK进行二分频产生液晶的时钟信号
- 机器人要走入智能家居还需突破什么?(10-14)
- 深度解读美国服务机器人技术路线图(09-18)
- 基于STM32的家庭服务机器人系统设计(02-13)
- 智能机器人在家庭医疗保健的设计和应用(09-19)
- 萌萌哒的智能机器人前台(09-05)
- 工业机器人过去与现在对比(02-16)