无人机系统解决方案及应用趋势集锦TOP7
获取的竖直摄影影像、交向摄影影像、倾斜影影像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量网,能进行多达 10000($0.1020)片影像的大区域网光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;并且,能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。
(1)快速响应
无人机航测通常低空飞行,空域申请便利,受气候条件影响较小。对起降场地的要求,可通过一段较为平整的路面实现起降。升空准备时间15分钟即可、操作简单、运输便利。车载系统可迅速到达作业区附近设站,根据任务要求每天可获取数十至两百平方公里的航测结果。
(2)快速获取地表数据和建模
系统携带的数码相机、数字彩色航摄相机等设备可快速获取地表信息,获取超高分辨率数字影像和高精度定位数据,生成DEM、三维正射影像图、三维景观模型、三维地表模型等二维、三维可视化数据,便于进行各类环境下应用系统的开发和应用。
(二)利用像素工厂进行后期数据处理
利用无人机遥感技术,结合像素工厂进行信息处理和分析。所得的数据将成立体三维图像,实时反馈给主管部门。
像素工厂(Pixel Factory,PF)由法国SPOT INFOTERRA公司研制开发,是一套用于大型生产的对地观测数据处理系统,是一种能批量生产,且由一系列算法、工作流程和硬件设备组成的复合最优化系统,包含具有强大计算能力的若干个计算节点。输入航空数码影像、卫星影像、或者传统光学扫描影像,在少量人工干预的条件下,经过一系列自动化处理,输出包括数字表面模型(DSM)、数字高程模型(DEM)、正射影像(DOM)以及真正射影像(TDOM)等产品,并能生成一系列其他中间产品。
TOP3 正射影像和传统正射影像
1. 大规模生产真正射影像和传统正射影像
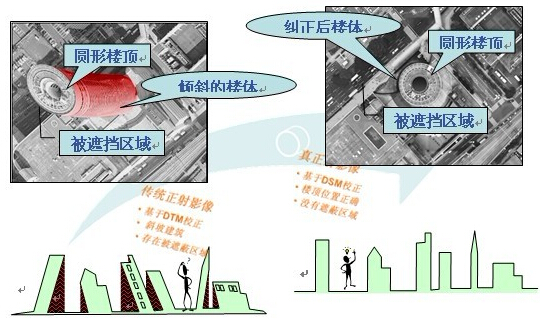
真正射影像(TrueOrtho™)指所有物体的倾斜均被纠正的一种镶嵌影像。它是利用数字表面模型DSM,采用数字微分纠正技术,改正原始影像的几何变形,保证影像上每点都是完全垂直视角。像素工厂可以通过对多视角的影像逐点计算,消除所有倾斜,生成真正射影像。与传统的正射影像相比,在大比例尺影像图中,避免了高大建筑的倾斜对其它地物的遮挡,在拼接地区能够实现平滑自然的过渡。利用完美的DSM 能够生成完美的真正射影像。像素工厂实现了真正射产品的商业化和大规模生产,并实现了针对真正射影像的一系列解决方案,例如大气纠正、物理纠正、匀色等。真正射影像图直接用于做线画图,可大大降低制图成本,提高作业效率。
传统摄影测量处理中,经过数字高程模型(DEM)校正、镶嵌得到正射影像。根据影像获取的几何原理,繁华的城市地区需要一些手工编辑以最小化每张影像的视差(建筑物倾斜) 。而真正射影像通过高精度DSM纠正消除了所有视差,建立了完全垂直视角的地表景观,建筑物保持垂直视角,因此在真正射影像上,只显示了建筑物的顶部,不显示侧面,避免了高大建筑物对其他地表信息(其他较矮建筑物、道路、停车场、绿地等)的遮挡,恢复了桥梁的正确方位。下图反映了传统正射影像与真正射影像之间的主要区别。
(a) 传统正射影像中有建筑物倾斜效果
(b) 真正射影像中没有任何建筑物倾斜效果
像素工厂专利产品-真正射影像™(全自动处理)

传统正射影像

真正射影像
2. 数字表面模型(DSM)
像素工厂具有全自动提取密集数字表面模型DSM的能力,与传统摄影测量系统相比,像素工厂的优势之一就在于数字表面模型(DSM) 的计算。传统的摄影测量系统计算DSM 需要人工估计高程信息,而"像素工厂"则可以在25cm 到1m 的地面采样距离(GSD) 之间自动进行DSM 计算, 无需人工干预。
在加载了影像数据之后,像素工厂会利用专有的算法生成大量立体像对,并将这些立体像对分配到可用的计算结点上进行并行计算,这样可以减少立体像对匹配过程所花费的时间。根据对多视角数据的自动多重相关,可轻松提取DSM,航向和旁向的立体像对之间通过多相关方法进行匹配,这是一个逐点进行计算的过程。自动化算法可从原始影像每两像素提取高程信息,最后通过融合得到数字表面模型。此外,像素工厂系统可以导入导出 LAS(LIDAR)格式数据,因此可对LIDAR DSM和多重相关生成的DSM进行混合。
3.数字地形模型(DTM)
像素工厂通过对DSM采取滤波算法,可半自动化的生成DTM,减少50%到95%的人工编辑。
TOP4 无人机高清影像实时压缩处理传输平台解决方案
无人机低空航拍摄影技术作为一项空间数据获
- 无人机系统电路设计图集锦TOP5(03-24)
- 无人机遥感传感电路设计与原理分析(04-18)
- 无人机技术科普:硬件与算法外 还有“状态”视角(05-20)
- 什么是无人机避障技术 在消费级无人机领域为什么火不了?(11-19)
- 浅谈无人机飞控系统解决方案(03-22)
- 解读ATmega2560无人机摇杆微控制器设计方案(04-13)