MEMS技术浅谈及应用设计方案集锦
大动态范围(VACT设为吸合之前的最大允许值)将独立于一阶k值。这是因为增加k不仅会降低MEMS灵敏度,增加以 传感器输入为参考的ASIC噪声,而且也会使反馈力增加同样的数量,因为这种方法允许在更高的VACT时工作。在MEMS噪声主导传感器性能的情况下,应 增加k值,以便支持更大的动态范围。而在工作不受吸合限制的情况下,最好是减小k值,从而提高MEMS灵敏度,减小ASIC噪声对传感器噪声的影响。需要 注意的是,k值会改变MEMS单元的谐振频率。在开环传感器中,谐振频率设定了传感器带宽的上限,而对闭环系统来说不是这样。因此k值可以根据动态范围和 噪声要求进行设置。
传感器性能对MEMS和ASIC参数的高度依赖性表明,闭环传感器的系统级设计需要做大量的折衷考虑,其中的 ASIC噪声预算、激励电压、功耗和技术都高度依赖于MEMS参数。因此为了实现最优的传感器,强烈推荐基于传感器总体目标规格的ASIC与MEMS协同 设计方法,而不是针对已经设计好的MEM再进行ASIC设计。
关于作者
Ayman Ismail是位于埃及开罗的Si-Ware系统公司ASIC解决方案事业部首席工程师,可以通过电子邮件地址 ayman.ismail@si-ware.com与他取得联系。(end)
基于MEMS惯性传感器的加速度测量无线传输系统设计
微电子与微机械(MEMS)技术的发展,使现代传感器设计向微型化、智能化、集成化、微低功耗方向发展。MEMS技术突破了传统传感器设计受质 量、体积、功耗等技术瓶颈的束缚,在各测量领域有着非常广泛的应用。而随着无线技术的发展,传感器技术与无线技术结合得越来越紧密,利用无线技术开发信号 采集无线传输模块可以克服有线传输的弊端。
本文结合三轴线性MEMS惯性传感器LIS331DL和单片无线收发器nRF905 构建加速度测量无线传输系统,避免因采用传输导线所带来的不利影响和使用上的不方便。该系统的特点是集电源、加速度传感器、微控器、射频收发器于一体,体 积小、功耗低,能够实现对运动物体三维方向上加速度的测量。所设计的系统装置可以非常方便地固定于运动物体上,尤其适合近距复杂环境中对运动物体加速度的 测量。
1 系统组成和工作原理
系统总体构成如图1所示。系统分为主、从机两部分。从机负责测量运动物体的加速度并通过射频传输方式发射测量数据;主机负责接收从机发射的数据,对数据进行实时显示,并将数据结果通过RS 232串口保存到PC机中以供分析。

系统采用电池供电,在非工作模式下处于待机模式,通过控制按键实现工作模式和待机模式的切换以进一步节省功耗,保证电池长时间工作。
2 硬件设计
硬件设计主要包括传感器与微控器外围连接电路设计、射频收发器与微控器外围连接电路设计等。
2.1 微控制器
经对比选用高速C8051F310单片机作为系统的微控器。C8051F310是完全集成的混合信号片上系统型MCU芯片,具有片内上电复位、VDD监视器、看门狗定时器和时钟振荡器的真正独立工作的片上系统,片内外设丰富。
2.2 LIS331DL传感器电路设计
LIS331DL是ST纳米运动传感器家族中具有最小封装(LGA16封装,3 mm×3 mm×1 mm)、最低功耗(小于1 mW)的三轴线性加速度传感器。
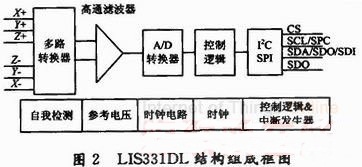
逻辑框图如图2所示。LIS331DL内部有按互相垂直关系放置的三个敏感质量块。当有外界加速度作用时,敏感质量块会偏离其平衡位置一段位移,外界加 速度越大位移就越大。由于敏感质量块位于两个电极组成的电容之间,质量块位移的变化会引起电容电极两端电荷量的变化,电荷量的变化经电容/电压变换器转化 为电压的变化,A/D转换器将模拟电压值转换为二进制数字值,从I2C/SPI串行接口的三个输出轴以二进制补码的形式输出。该芯片能够测量运动物体在三 维空间的线加速度,三个输出轴上加速度的矢量和即为运动物体的加速度。
该芯片具有标准的I2C/SPI串行总线接口,内置嵌入式功能, 为用户提供动态可编程设置的两个量程±2g/±8g以适应不同的应用场合,数据输出速率可编程选择为100 Hz/400 Hz以适应不同外设的速率要求。当外界加速度值超过三个输出轴中至少一个轴的可编程加速度阈值时,芯片可被配置用以产生惯性唤醒/自由落体中断信号。 LIS331DL能够承受10 000g的加速度冲击而依然保持性能不变。

LIS331DL与C8051F310的电路连接如图3所示。C8051F310内部有一个标准的SPI串行接口,通过交叉开关将 C8051F310(主机)的四线制SPI外部引脚配置在P0.0(总线时钟SCK)、P0.1(主人从出MISO)、P0.2(主出从入)和 P0.3(从机SPI片选
AT89C205l LIS331DL 惯性传感器 MEMS 相关文章:
- 基于MEMS惯性传感器的加速度测量无线传输系统设计(06-13)
- 多轴传感器受追捧 MEMS加速挺进医疗设计(03-24)
- Ka 波段下90°分布式MEMS 移相器的优化设计(04-02)
- MEMS加速度计在声学拾音器中的应用(09-30)
- MEMS光开关性能与发展(10-24)