构建基于PXI电子液压制动系统EHB驾驶员在回路混合仿真实验平台
在DYNAanimation环境下建立三维图像文件,包括道路、标识线、车身模型、轮胎、路障等,进行驾驶员在环的"麋鹿"测试。在车速为80km/h时对比打开稳定性控制与关闭稳定性控制车辆的操纵响应。在实时仿真结束,保存录像并进行对比。在打开稳定性控制时,驾驶员可以平稳地实现车辆的变线,车辆的运动轨迹符合驾驶员的预期,如左下图所示。当关闭稳定性控制时,车辆失控跑出跑道。基于VeriStand构建的驾驶员在环测试平台可以实现逼真的产品演示。

开启稳定性控制

关闭稳定性控制
5.2、利用激励进行正弦延迟测试
正弦延迟测试是美国国家高速安全局(NHTSA)规定的126号法规,用于检测车辆的侧向稳定性能。不同于麋鹿测试,现实实验中需要通过转向机器人完成。VeriStand的配置实时激励功能很好地帮助我们完成该项测试。试验在干燥、平直附着系数为0.9的道路上进行,方向盘转角进行后半周期带有延迟的正弦输入,频率为0.7HZ,第二次波峰出现后有400ms的延迟。方向盘转角及实验流程如下图,其中A为80km/h下车辆侧向加速度达到0.3g时方向盘的转角。
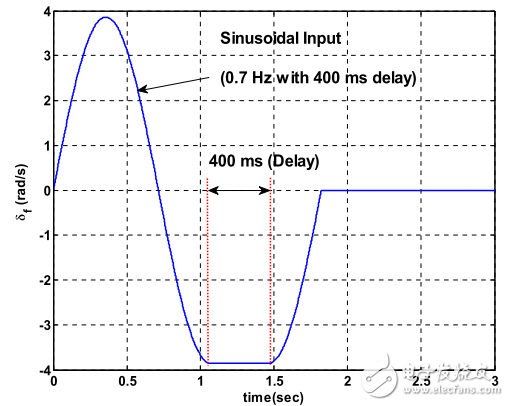
正弦延时输入
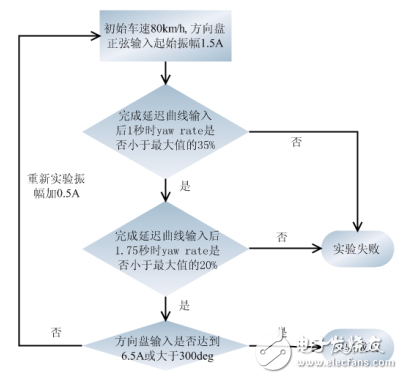
试验流程
通过实时激励功能里的正弦函数、延时函数编制激励文件,通过记录功能保存横摆角速度的变化曲线。VeriStand大大降低了编程的复杂性,减少测试系统的开发时间。
6、总结
利用VeriStand我们在短时间内搭建起一个功能丰富的混合仿真平台,使我们有更多的精力投入到控制策略的研究上来;VeriStand Engine将实时测试系统的任务和功能在内部进行实施与优化,帮助实时测试系统以更快的速度运行,大大降低了应用程序开发和维护成本;基于FPGA的自定义I/O设置提高了系统硬件的可扩展性,通过FPGA虚拟传感器可扩展为基于单片机控制器的硬件在环测试平台;总之,NI公司一系列软件和硬件产品帮助我们灵活、高效、直观地实现EHB混合仿真测试平台,为产品的研制奠定了坚实的基础。
- 将HIL应用于无人机制导、导航与控制(03-01)
- 基于PXI模块化仪器和LabVIEW软件,开发二次监视雷达自动测试系统(08-17)
- 航空电子自动测试系统?交给虚拟仪器完成!(02-06)
- NI为频谱监测提供了更好的解决方案(02-11)
- 最实用的GPS接收器测试详解(02-26)
- 借助SC Express减少结构化测试次数(02-26)