构建基于PXI电子液压制动系统EHB驾驶员在回路混合仿真实验平台
义的FPGA I/O接口,利用FPGA灵活高效的特点在无需改变硬件配置的情况下完成控制器的快速原型。
3、 车辆实时模型的建立
3.1、Tesis DYNAware的车辆模型
NI VeriStand支持第三方软件DYNAware生成的模型文件。DYNAware是Tesis公司开发的一款全面高效的车辆动力学仿真软件,从电脑上的汽车概念设计,到汽车动力学控制器与硬件结合的硬件在环试验环境,都可以通过其达到很好的效果,仿真结果可以通过DYNAanimation软件在显示器上实时显示。在德国几乎所有的汽车制造商都在使用DYNAware的产品,世界范围内也非常流行,基于不同的需求为生产厂家和零部件供应商提供了适当的仿真软件包。通过在图形化界面中设置参数,简洁直观地完成建模。建模对象包括整车尺寸、轮胎、前后轴、悬架、发动机、传动系、空气动力学等模型,可以建立多达几十个自由度的车辆动力学模型,很好地反应车辆在各种工况条件下的动力学特性。

车辆总体尺寸建模
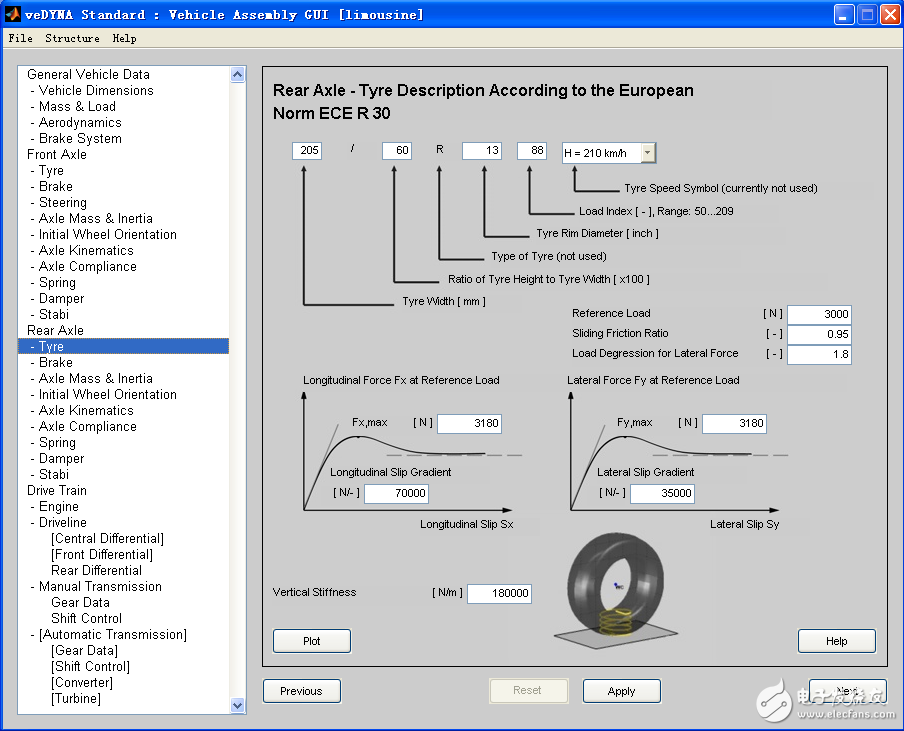
轮胎特性建模
3.2、EHB控制器模型
EHB控制器模型首先接受车辆模型传来的纵向加速度和轮速,估计参考车速。同时接受方向盘转角,横摆角速度、侧向加速度,利用估计的参考车速估计质心侧偏角。汽车稳定行驶时,目标制动力矩与制动踏板位移成比例关系。汽车失稳时,EHB系统主要的控制对象是汽车的横摆角速度和质心侧偏角。其中横摆角速度控制模块采用PD控制方法,控制实际横摆角与理想二自由度横摆角之间的偏差,输出为目标制动力矩。质心侧偏角控制采用门限值控制方法,根据超出门限的程度施加制动力矩。根据车辆运动状态协调上述三种模式下的输出量得到目标制动力矩。调用制动力矩—轮缸压力模块,计算出目标轮缸压力,再转入开关电磁阀数字PID控制模块,输出电磁阀的占空比。此外,根据高压蓄能器设定压力及HCU的工作状态输出泵电机的占空比,控制框图如下图所示:

EHB控制器模型
EHB控制器模型在Simulink/Stateflow环境下建模,与上述DYNAware中模型实现无缝集成。模型采用固定步长常微分方程求解器,通过Real-Time Workshop转化为VeriStand支持的dll动态链接库文件。
4、配置VeriStand
在System Explorer Window中导入模型文件,对Primary Control Loop的实时仿真速度进行调整,设置周期为100μsec,则Model Execution Loop的周期为1ms,满足车辆实时仿真的需要。通过分配处理器资源,Veristand能充分发挥双核处理器的并行处理性能,提高实时运行速度。横摆角速度是判断汽车失稳的重要标志,当理想横摆角速度与实际横摆角速度之差超过上下门限值时,通过报警设置以报警音的方式提示驾驶员。
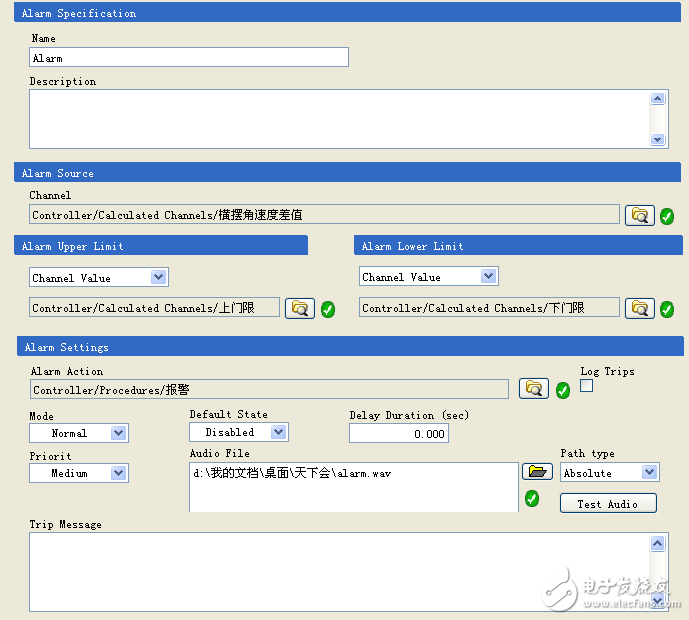

VeriStand的配置
通过菜单界面完成对NI-CAN、NI-DAQ的通道设置,大大减小了程序的开发工作量,提高了开发效率。在Stimulus Profile Editor中设置Logging file,可以对横摆角速度、质心侧偏角、轮缸压力等进行保存。TDMS文件格式读取快速,作为一种测试测量领域的通用数据文件格式,非常适合车辆状态参数的保存。

VeriStand与DYNAanimation的连接
上面的循环通过Workspace VI启动VeriStand,获取通道数据包括Simulation Time、Animation Data、Display Data。下方的循环利用ActiveX控件将动画和显示数据传送给DYNAanimation。
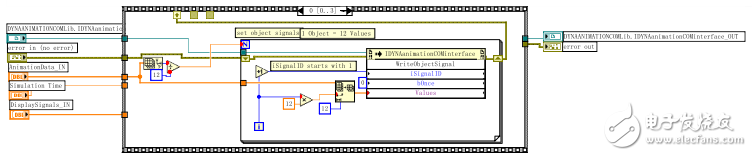
通过ActiveX方法控制DYNAanimation
DYNAanimation将实时仿真结果在虚拟现实的环境中直接现实出来。其中,Animation Data数组中每十二个元素代表一个运动物体(如车身、轮胎)相对于大地坐标系的位置参数。Display Data用于界面的数据显示,比如车速表、转速表等。
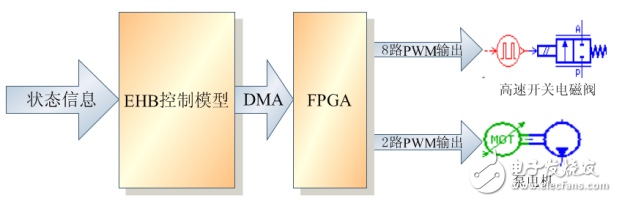
FPGA I/O示意图
液压控制单元在改装博世ESP的基础上得到,四个轮缸各由两个高速开关阀控制,一个控制从高压蓄能器增压,一个控制向低压蓄能器减压,需8路PWM信号。2路PWM输出负责对泵电机的控制。VeriStand中默认的PXI-7851R的通道资源拥有8路PWM输出,而这里需要10路PWM输出。通过自定义FPGA VI,修改VeriStand配置文件夹中7851R的fpgaconfig文件,新增2路数字输入输出接口为PWM输出,满足应用的需要。可见基于VeriStand的自定义FPGA I/O功能使混合仿真平台具有灵活方便的扩展性能。
5、仿真平台的功能演示
5.1、驾驶员在环麋鹿测试
在DYNAanimation环境下建立三维图像文件,包括道路、标识线、车身模型、轮胎、路障等,进行驾驶员在环的"麋鹿"测试。在车速为80km/h时对比打开稳定性控制与关闭稳定性控制车辆的操纵响应。在实时仿真结束,保存录像并进行对比。在打开稳
- 将HIL应用于无人机制导、导航与控制(03-01)
- 基于PXI模块化仪器和LabVIEW软件,开发二次监视雷达自动测试系统(08-17)
- 航空电子自动测试系统?交给虚拟仪器完成!(02-06)
- NI为频谱监测提供了更好的解决方案(02-11)
- 最实用的GPS接收器测试详解(02-26)
- 借助SC Express减少结构化测试次数(02-26)