人形机器人制作秘籍 全面还原DIY制作过程
时间:07-01
来源:电子发烧友整理
点击:
给自足!完全DIY!!东西都备齐了,现在开始干活吧!
3.2 具体制作
要有熟悉机械的人指导最好不过,实在没人教可以翻工具手册,或上网查各种工具的用法。
首先在铝板上用油性笔画出轮廓线包括折线,以及孔的位置。(这一步必须非常精确!)
先用剪板机或铁皮剪剪下需要部分,接着用折板机或台钳折板,然后用台钻或手钻打好孔。最后,对于不满意的地方——锉!(锉刀才是王道!)理论上来说,木有什么形状我们锉不出来!!!!!!!!
有的比较复杂或者精度要求比较高的结构比如下图所示我们机器人的手部结构——需要很精细的加工,并且要承受较大的力,这时则可以考虑用solidworks画好做好工程图后,拿去机械厂加工。比如以下几个结构:
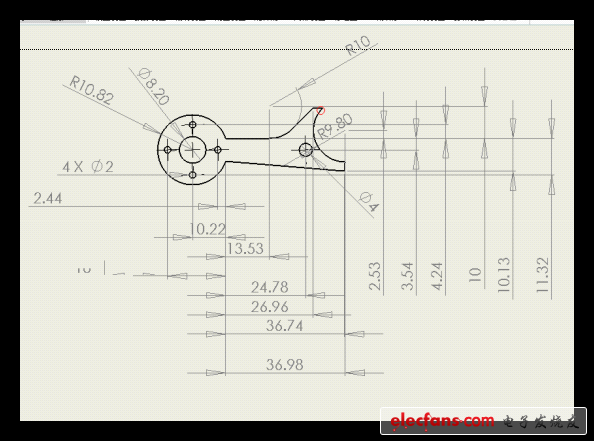
这是我自己设计并送往机械厂加工的的拇指工程图。(画红圈的位置在实际运动过程中发现有点紧,需要稍微磨掉点。)
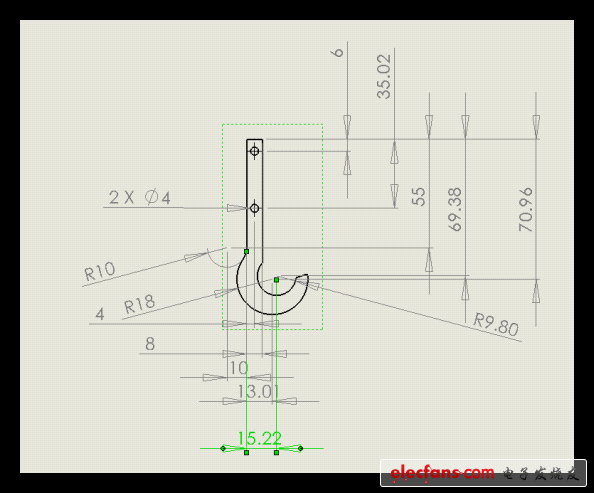
钩子的工程图。
4 组装
组装要及时,这样才能及时发现问题及时修改!
给零件标上号。
将各个模块装配好,测试各个模块的强度,以及灵活程度。
依照从下而上的顺序,依次连接好各个部分。
将其他物件如电路板,电池固定到机器人身体上。
对舵机进行布线(可以用胶布将同方向的线束起或者粘在外侧),给机器人的运动留下足够的空间,避免任何可能缠绕或碰撞。
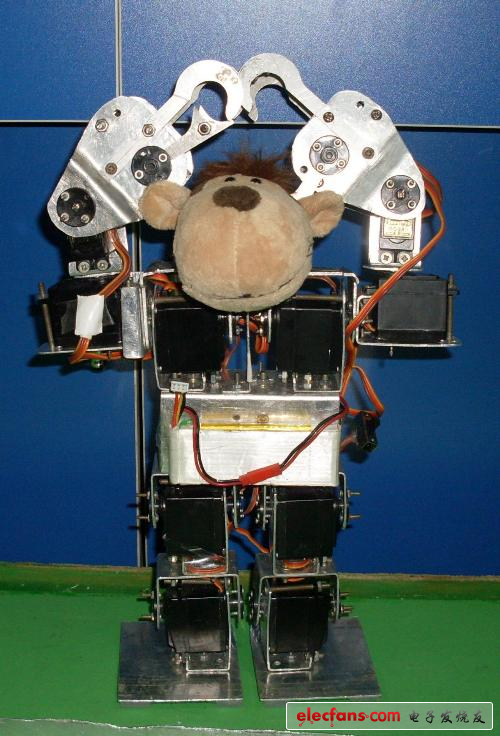
Ok,一个崭新的机器人 诞生了!!!!铛铛铛铛(音乐响起~~) 鼓掌!撒花!
注:我们在实际机械制作过程中遇到了各种问题(没考虑到螺丝粗细),以至于后来手部结构重新设计,由于需要做弯折,而弯折很难做精确,所以没有再用solidworks画。想要一点问题都不出还真不是那么简单。 所谓无图无真相,大家还是看图吧!
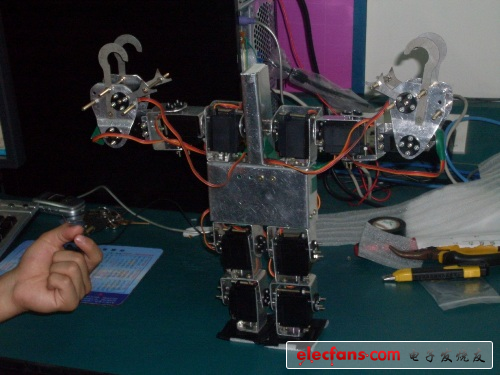
早期的大强
- HERMES与可穿戴外骨骼机器人技术详解(02-07)
- 超酷摩托车:您能相信这是学生制作的吗?(06-27)
- 创意制作:LED汽车表情仪DIY制作(07-02)
- 多图详细教你怎样做一部Arduino小车(06-24)
- 国外天才学生DIY 19岁学生造可骑乘液压机器人(07-06)